Renewed interest in the space industry has in part been catalyzed by highly efficient electric propulsion systems that deliver enhanced mission capabilities at increasingly reduced launch costs1,2,3. Many different types of space electric propulsion devices have recently been proposed and tested4,5,6,7,8 supported by the present-day interest in space exploration9,10. Among them, gridded ion11,12 and Hall-type thrusters13,14 are of primary interest due to their ability to reach very high efficiency of about 80%, exceeding that of any chemical thruster, including the most efficient oxygen-hydrogen systems, the efficiency of which is limited to about 5000 m/s by the principal physical laws15,16,17,18.
Comprehensive, reliable testing of miniaturized space thrusters typically requires a large complex of test facilities that include test chambers, vacuum facilities (pumps), control and diagnostics instruments, a system for measurement of plasma parameters19, and a wide range of auxiliary equipment that sustain the operation of the thruster, such as an electric power supply system, propellant supply unit, thrust measurement stand and many others20,21. Moreover, a typical space propulsion thruster consists of several units which separately influence the efficiency and service life of the whole thrust system, and therefore, could be tested both separately and as part of the thruster assembly22,23. This significantly complicates test procedures and implies long test periods24,25. Reliability of a thruster's cathode unit, as well as operation of thrusters when different propellants are used also requires special consideration26,27.
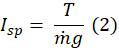
To quantify performance of an electric propulsion system, and to qualify modules for operational deployment in space missions, ground testing facilities which enable simulation of realistic space environments are needed for testing of multi-scaled propulsion units28,29,30. An example of such a system is a large scaled space environment simulation chamber located at the Space Propulsion Centre-Singapore (SPC-S, Figure 1a,b)31. When developing such a simulation environment, the following primary and secondary considerations need to be taken into account. Primary concerns are that the thus-created space environment must accurately and reliably simulate a realistic space environment, and the in-built diagnostic systems must provide precise and accurate diagnostics during performance evaluation of a system. Secondary concerns are that the simulated space environments must be highly customizable to enable rapid installation and testing of different propulsion and diagnostic modules, and the environment must be able to accommodate high throughput testing to optimize discharge and operational conditions of multiple units simultaneously.
Space environment simulators and pumping facilities
Here, we illustrate two simulation facilities at SPC-S that have been implemented for the testing of miniaturized electric propulsion systems, as well as integrated modules. These two facilities are of different scales, and primarily have different roles in the process of performance evaluation, as outlined below.
Large plasma space actuation chamber (PSAC)
The PSAC has dimensions of 4.75 m (Length) x 2.3 m (Diameter) and has a vacuum pumping suite which comprises of numerous high capacity pumps working in tandem. It is able to achieve a base pressure lower than 10-6 Pa. It has an integrated vacuum control readout and pump activation/purge system for evacuation and purging of the chamber. It is equipped with numerous customizable flanges, electrical feedthroughs and visual diagnostic portholes to provide line test facility. This, together with a full-suite of diagnostics capabilities mounted internally, allows it to be rapidly modified for multi-modal diagnostics. The scale of PSAC also allows for testing of completely integrated modules for applications in a simulated environment.
PSAC is the SPC-S flagship space environment simulation facility (Figure 1c,d). Its sheer size allows for testing of complete modules of up to a few U's mounted on a quadfilar stage. The advantage of this method would be in the real-time visualization of how the propulsion modules as mounted on different payloads may influence in situ maneuvering of payloads in space. This is simulated through the mounting and suspension of the entire payload on a proprietary quadfilar thrust measurement platform. The thruster can then be fired, and the suspended platform with the thruster and payload would be tested according to space conditions. Propellant gas feedstocks which enter the test environment via the electric propulsion modules are pumped out efficiently by the vacuum suite to ensure that the chamber's overall pressure is not altered, thus, maintaining a realistic space environment32,33,34. Furthermore, electric propulsion systems typically involve the production of plasmas and exploit the manipulation of trajectories of charged particles exiting the system in order to generate thrust35. In smaller simulation environments, the buildup of charge or plasma sheaths on the wall may affect the discharge performance through plasma-wall interactions due to its proximity to the propulsion system, especially for micropropulsion where typical thrust values are in the order of millinewtons. Therefore, special attention and emphasis must be made to account for and marginalize contributions from such factors36. The PSAC's large size minimizes plasma-wall interactions, rendering them negligible, giving a more accurate representation of discharge parameters and enabling monitoring of plume profiles in electric propulsion modules. The PSAC is typically used in full module evaluation and systems integration/optimization processes which allows for quick translation of thruster prototypes into operationally ready systems for ground testing in preparation for space qualification.
Scaled plasma space environment simulator (PSEC)
The PSEC has dimensions of 65 cm x 40 cm x 100 cm and has a vacuum pumping suite which comprises of six high capacity pumps working in tandem (dry vacuum pump, turbomolecular and cryo vacuum pumps). It is able to achieve a base pressure lower than 10-5 Pa when the whole pumping system is operating (all pumps are in use). Pressure and propellant flows are monitored in real-time through integrated mass flow readout boxes and pressure gauges. The PSEC is primarily employed in endurance testing of thrusters. Thrusters are fired for extended periods of time to evaluate effects of plasma damage on discharge channels and on its lifetime. Additionally, as shown in Figure 2, a complex gas flow controller network in this facility enables quick connection of other feedstock propellants to the cathode and anodes to test compatibility of thrusters with novel propellants and effects of the latter on thruster performance. This is of increased interest to research groups working on "air-breathing" electric thrusters utilizing novel propellants during operation.
Integrated diagnostic facilities (multi-modal diagnostics)
Different integrated diagnostic facilities, equipped with automated integrated robotic systems (AIRS-µS)19,23, have been developed for the two systems in PSEC and PSAC to cater for diagnostics at different scales and purposes.
Integrated diagnostics in PSEC
The diagnostic tools in PSEC essentially hinge on real-time monitoring of discharge through extended operations. The quality management system monitors residual gas in the facility for contaminant species that arise from sputtering of material during a discharge. These trace amounts are quantitatively monitored over time to evaluate erosion rates of the discharge channel and electrodes of the thruster to estimate the thruster's lifetime. The optical emissions spectrometer (OES) complements this procedure by monitoring spectral lines corresponding to electronic transitions of contaminant species due to erosion, such as copper from the electronics. OES also enables non-invasive plasma diagnostics and active monitoring of plume profile which qualitatively evaluates performance of the thruster. Finally, a robotic Faraday probe which can be controlled remotely, or set to fully autonomous mode, is used to derive quick sweeps of the plume profile to optimize collimation of beam through parametrically varying discharge conditions (Figure 3).
Integrated diagnostics in PSAC
The luxury of physical space in the PSAC enables installation of multiple thruster systems at various locations due to its modular design, allowing for plug-and-play-like installation for various diagnostics simultaneously. Figure 4 shows the internal cross-section of the PSAC in various configurations, with the fully suspended quadfilar thrust measurement platform being its most notable and permanent fixture. Turret systems, controlled autonomously or wirelessly via Android apps using microcontrollers and Bluetooth modules, can then be mounted in a modular manner facing the thruster to obtain characteristics of the plume through the installation of various probes such as Faraday, Langmuir and Retarding Potential Analyzer (RPA). Also shown in Figure 4 is the ability of the PSAC to allow for configurable mounting of thruster systems for rapid simultaneous diagnostics of various plasma parameters. The thrusters can be mounted vertically in a single column and tested rapidly, one after another to avoid interactions between the different thruster systems. It has been verified that efficient evaluation of up to 3 different modules at a single instance is possible, thus significantly reducing the downtime during evacuation and purging processes required otherwise when testing systems individually. On the other hand, this system is a valuable opportunity for testing the thruster assemblies that should operate in a bunch, on the same satellite. The thrusters can be mounted vertically in a single column and tested rapidly, one after another to avoid interactions between the different thruster systems. It has been tested to be effective in the evaluation of up to 3 different modules at a single instance, significantly reducing downtime during evacuation and purging processes required otherwise when testing systems individually.
It is vital to determine the thrust in micropropulsion systems accurately so that parameters such as efficiency, ηeff and the specific impulse Isp, are accurate, thus, giving a reliable representation of the dependence of thruster performance on various input parameters such as the propellant flow, and power supplied to the different terminals of the thrusters as shown in Equations 1 and 2. Explicitly, performance evaluation of micropropulsion systems typically revolves around the measurement of thrust generated from the system at various operating parameters. Therefore, performance evaluation systems need to be calibrated according to a set of standards before being installed into the space environment for use in diagnostics and testing to ensure their reliability and accuracy19.
Typical systems employ force calibration externally before thrust measurement units are installed into the test environment38. However, such systems do not account for the space environments affecting the material properties of the calibration standards, and for electrical, vacuum and thermal influences on the degradation of the calibrated standards over the dynamic course of performance evaluation of the thrusters. The automated wireless calibration unit shown in Figure 5, on the other hand, allows for in situ calibration of the system in the simulated environment before the thruster is operational. This accounts for the dynamic effects of the test environment on the measurement stage, and allows for rapid re-calibration of the system prior to firing of thrusters. The system also features a symmetric modular null thrust verification unit which verifies the thrust independently. It is operated while the thruster is operational for in situ analysis of the derived thrusts from given discharge conditions. The entire process is done via MATLAB apps, allowing users to focus on optimization of hardware and design of propulsion systems, and expedites testing of such systems. Details of this method would be elaborated in the following subsection.
Thrust calibration procedure and thrust performance evaluation
Evaluation of thrust values from the quadfilar thrust measurement stage comes in two phases. The first phase is through obtaining calibration factors from the automated wireless calibration unit shown to the right of Figure 5. In this calibration process, fine weights are lowered across a smooth polytetrafluoroethylene bar which translates the vertical effects of a weight into a horizontal force as attached to the thruster on the quadfilar stage. A high-resolution laser displacement sensor then measures the displacement at each interval accordingly. This is monitored by an operator via a data acquisition app as shown in Figure 6, and a calibration factor is obtained at the end of the series where numerous calibrated weights are lowered onto the system. The calibration factor S is obtained from the best fit line of the horizontal force-displacement graph, and the subsequent thrust is calculated using Equation 3:

where Vbaseline is the analog baseline voltage from the laser displacement sensor read prior to firing the thruster, and Vmeasured is the measured voltage from the sensor during in situ operation of the thruster.
A clearer representation of the calibration system is shown in Figure 7. It is to be noted that the green line and red circles are for illustration purposes only and merely serve as a guide for the eye. In reality, the green line is a fine Madeira polyamide fiber which connects to the mounted thruster. The calibrated weights are small copper loops that have been carefully weighed by a high precision mass balance, and they can be adjusted accordingly to allow for a fine calibration regime initially (with smaller intervals in difference between masses), and to an extended regime (where larger masses are added towards the end of the calibration sequence).
A typical force-voltage graph will produce a straight line as shown in Figure 8 when the calibration unit, laser displacement sensor and quadfilar platform are properly installed. In this case, the plot yields a calibration factor (gradient) of 27.65 mN∙V-1 in a standardized set up for thrust measurements over a wide range of forces.
The calibration factor can be altered by modifying the sensitivity of the quadfilar platform, which depends on several factors such as the length of the quadfilar wires. In Figure 8, the sensitivity of the setup has been modified to fit in calibration weights for extended regimes. Both fine and coarse calibration weights are included to yield a calibration plot that is linear in both regimes.
A sample of the in situ measurements for thrust measured is shown in Figure 9. In this case, it shows how an operator is able to monitor the dependence of thrust on discharge voltage during the course of the experiment until the discharge is extinguished. Effects of other input parameters on the thrust can also be monitored in the same manner.
Using the quadfilar thrust measurement stage, we were able to measure the thrust generated by our hall thruster at various input powers, given by the discharge current and applied voltage. Through this information, the variation of  and
and  with respect to input power can be obtained. Figure 10a,b shows how the thrust and vary with input power at 4 different mass flow rates. Finally, the efficiency is plotted against the input power at different mass flow rates in Figure 10c. The results show that our thruster has been optimized to work at input powers below 100 W, where low flow rates have resulted in efficiencies of almost 30%19. Prior to optimization, the thruster barely achieved 20% efficiency at 83 W and 5.5 sccm. The results show that our thruster has been optimized to work at input powers below 100 W, where low flow rates have resulted in efficiencies of almost 30%19. This is arguably a decent achievement compared to the SPT100 Hall thruster, whose efficiency varies between 30% to 40%, and other Hall thrusters of similar sizes and input powers. Figure 10d illustrates the automatically plotted profile of ion current density.
with respect to input power can be obtained. Figure 10a,b shows how the thrust and vary with input power at 4 different mass flow rates. Finally, the efficiency is plotted against the input power at different mass flow rates in Figure 10c. The results show that our thruster has been optimized to work at input powers below 100 W, where low flow rates have resulted in efficiencies of almost 30%19. Prior to optimization, the thruster barely achieved 20% efficiency at 83 W and 5.5 sccm. The results show that our thruster has been optimized to work at input powers below 100 W, where low flow rates have resulted in efficiencies of almost 30%19. This is arguably a decent achievement compared to the SPT100 Hall thruster, whose efficiency varies between 30% to 40%, and other Hall thrusters of similar sizes and input powers. Figure 10d illustrates the automatically plotted profile of ion current density.
Null measurement protocol for independent thrust verification
While the thruster is being fired, the polyamide wire on the right-hand side corresponding to the calibration unit end is left slack. During the in situ operation of the thruster, the symmetric null measurement verification unit can then be triggered. The symmetric null measurement unit operates in a similar manner to the robotic calibration system shown in Figure 5; the miniature calibration weights attached to a fine polyamide wire are lowered in the system and create a horizontal force applied to the propulsion system. In this case, the horizontal force is applied to pull the quadfilar system which has been displaced upon operation of the thruster back to equilibrium. This process is shown in the time-dependent schematic of the process evolution in Figure 11. The thruster is first fired at t = 0 s, corresponding to panel (a) in the series. The quadfilar stage then displaces to the right as a result of the horizontal force from the propulsion unit. Since the environment is darkened in the space simulator, the motion of the stage is seen as the apparent movement of the thruster in (b). The quadfilar stage then stops oscillating and reaches an equilibrium steady state displacement as shown in (c). At this instance, the null system is triggered and the stepper motor is activated to pull the quadfilar stage back to equilibrium as shown in (d). The stepper motor is triggered to a point where the laser displacement sensor detects that the stage is back in the equilibrium position and the actuation is stopped. A measurement is then taken, and the thrust value from this system is given accordingly.
Actuation of robotic turrets for spatial in situ data sensing and plume profilometry
Modular robotic turret systems are also installed in both PSAC and PSEC for customizable diagnostics of plume profiles. These robotic turrets are also mounted on motor actuated stages for proper probe positioning according to the axial centerline of the thrusters externally. The robotic turrets comprise of shielded stainless steel enclosures containing programmable microcontrollers attached to wireless transponders for receiving and transmitting data. This also allows users to control the movement of the probe externally, while receiving data from sensors without additional electrical connections to the system. It is also worth noting that the modular design of the micro-servo motor actuated turret allows quick refinement of measurement setup that allows for multiple probe arrays including Langmuir, Faraday probe and RPAs be mounted on the same set up according to operational demands at the point of time. Figure 12 shows a schematic illustration of the experimental setup for plume profilometry.
During operation of the thruster, an operator can choose to manually actuate the system to desired angles as illustrated in Figure 12 to obtain plume characteristics at particular locations, or an automated sequence can be triggered. Depending on which probes are installed, the measurement processes can be varied according to the programmable sequence for obtaining complete spatial plume profiles of the discharge.
Such a sequence allows for quick spatial visualization of the plume profile which helps optimize engineering and process optimization in allowing for beam collimation for efficient thruster operation. Actuated turrets and programmable sensing systems allow for autonomous acquisition of plume characteristics at each point, where plasma parameters may be derived and calculated through programmable systems. This may expedite testing of such systems with easy analysis and manipulation of large amounts of data through simple robotic and actuated autonomous systems. In Figure 10d, for example, the plasma parameter being analyzed here is the ion current density at different angular positions. It shows how the discharge power influences the magnitude of the peak ion current density and the full-width at half maxima accordingly. These results show that higher discharge voltages do not necessarily translate to better thruster performance. Here, higher power results in the widening of the plume profile which is an undesirable characteristic of a thruster. This means that some of the exhaust particles have velocities which are not perpendicular to the thruster exit plane, resulting in a thrust in an unintended direction and making precise maneuvers challenging. Moreover, the charges from the plume may damage the payload or other subsystems on the spacecraft. To optimize the thruster to produce a more collimated plume, the current supplied to the magnetic coils and the potential drop at the anode can be adjusted until a satisfactory full-width at half maxima (FWHM) value has been achieved. Prior to plume profile optimization, its FWHM was 33.1° at 140 W but after optimization, it reduced to 23.7° at 110 W. This implies that the plume is now more collimated.
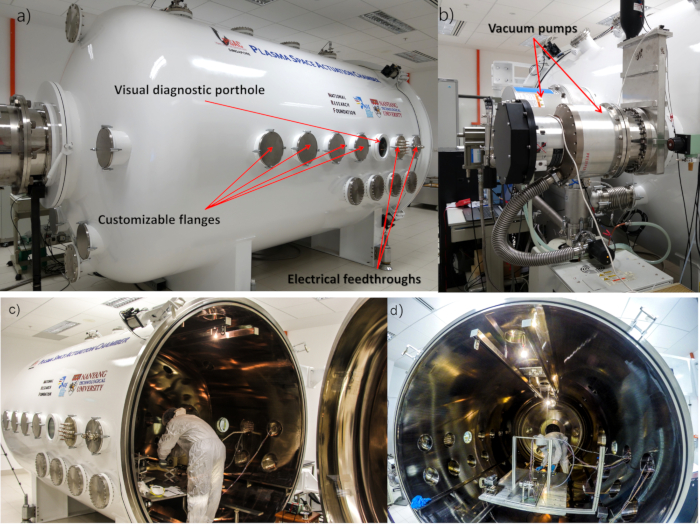
Figure 1: Large space environment facility for testing of electric propulsion thrusters. This flagship facility is located at the Space Propulsion Centre Singapore, National Institute of Education, Nanyang Technological University. (a) Side view of the chamber illustrates transparent portholes for visual diagnostics of test systems, and the multiple vacuum grade electrical feed-throughs that allow for communication, control and diagnostics of systems under test. (b) Vacuum pumps. (c) Side view of the chamber with a side loading hatch open. (d) View of the space simulation chamber with an operator installing diagnostic systems. Reprinted with permission from J. Lim et al., IEEE Trans. Plasma Sci. 46, 338 (2018) and J. Lim et al., IEEE Trans. Plasma Sci. 46, 345 (2018). Copyright 2018 IEEE. Please click here to view a larger version of this figure.
Figure 2: Rear view of a scaled plasma space environment simulator (PSEC). PSEC comprises a total of 6 pumps including high capacity cryogenic pumps, turbo-molecular pumps, and dry pumps. The setup also contains integrated thruster diagnostics. Please click here to view a larger version of this figure.
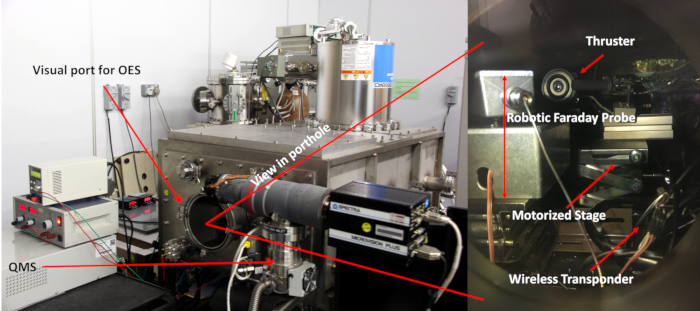
Figure 3: Overview of a plasma diagnostics suite in the PSEC. Right hand side of the figure illustrates a magnified view of the systems as viewed from the porthole from the front of the chamber. The visual diagnostic port also serves as an avenue for optical emission spectroscopy (OES) to be done. As shown in the exterior view of the chamber, a quadropole mass spectrometer is outfitted for residual gas analysis to evaluate material erosion rates due to sputtering in the chamber during prolonged thruster operation. Additionally, wirelessly controlled robotic Faraday probes are also mounted internally to evaluate plume profiles of the thrusters undergoing performance evaluation. Please click here to view a larger version of this figure.
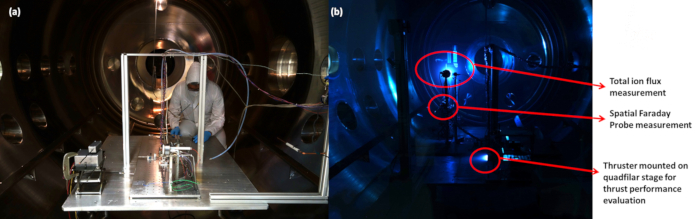
Figure 4: Overview of the integrated plasma diagnostics suite in the PSAC. (a) Customizable design shows a robotic Faraday probe turret placed alongside a quadfilar thrust performance evaluation stage, and an in-situ weight calibration unit. (b) Customizable features allow for up to three different thrusters to be mounted and tested simultaneously, reducing operational downtime and maximizing research output. Please click here to view a larger version of this figure.
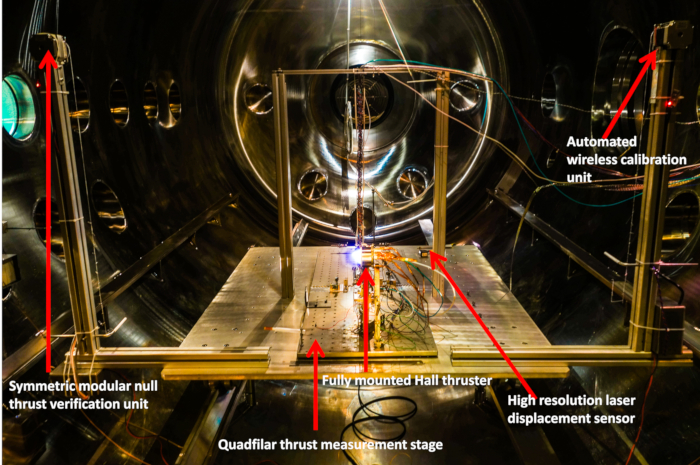
Figure 5: Schematic layout of the symmetric modular null thrust verification unit. Unlike the calibration system, the null thrust verification unit is operated while the thruster is fired to allow for independent verification of the thrust values obtained. Please click here to view a larger version of this figure.

Figure 6: Data acquisition app user interface. The user interface of the MATLAB-based app allows the operator to monitor the thrust and voltage reading from the laser displacement sensor in real time. Please click here to view a larger version of this figure.
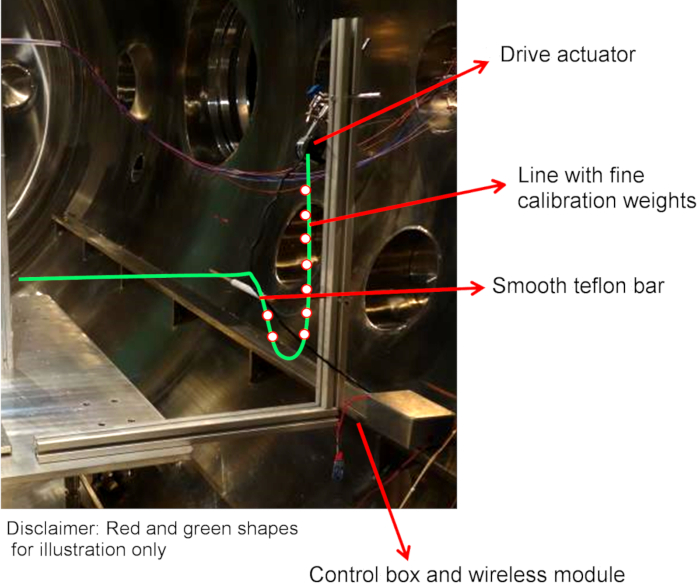
Figure 7: Calibration unit. A robotic calibration unit can be operated by a wireless operator input, or through fully autonomous calibration sequences for quick calibration of a quadfilar system. Design considerations: Minimize external influence; use thin, light weight string and millinewton weights; use low static coefficient bar; line must be flexible enough to produce "u-loop". For the calibration stand, use wireless control unit, fine Madeira monofilament polyamide (nylon) fiber (about 4.0 µm), small copper loops as weights and a smooth polytetrafluoroethylene bar. Line should be attached to rear of mounted thruster on quadfilar pendulum or in line with the center of the reflector plate. Please click here to view a larger version of this figure.
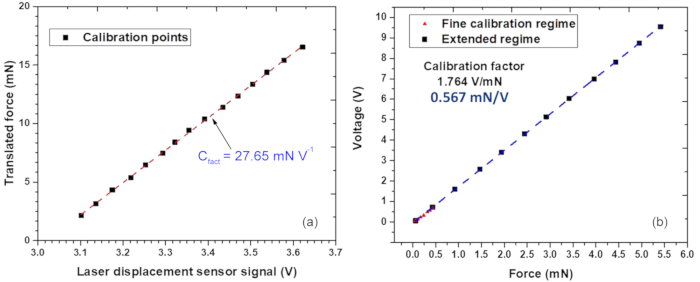
Figure 8: Typical force-voltage and force-voltage graphs for modified setup. (a) Force-voltage graph.The amount of weight which has been lowered and translated into a horizontal force is plotted against the corresponding voltage reading on the laser displacement sensor. The calibration factor (in mN/V) is the gradient of the force/voltage graph which will be used in the data acquisition app. (b) Force/voltage graph. The sensitivity of the setup towards the applied force was increased to accommodate for both fine and coarse calibration. Please click here to view a larger version of this figure.
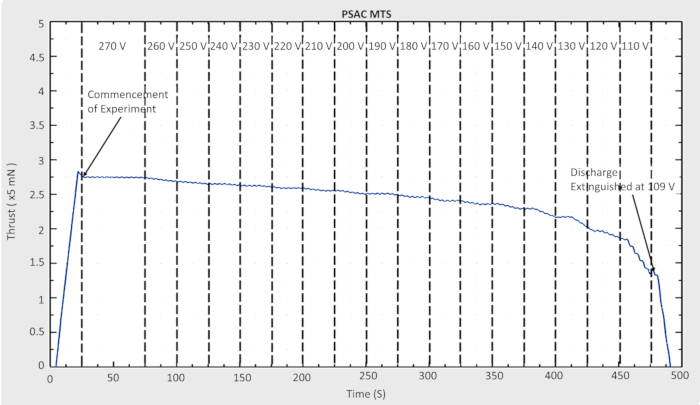
Figure 9: In-situ performance evaluation. Another software program allows the thrust performance to be monitored in real-time when an input parameter, the discharge voltage in this case, is changed gradually. Please click here to view a larger version of this figure.
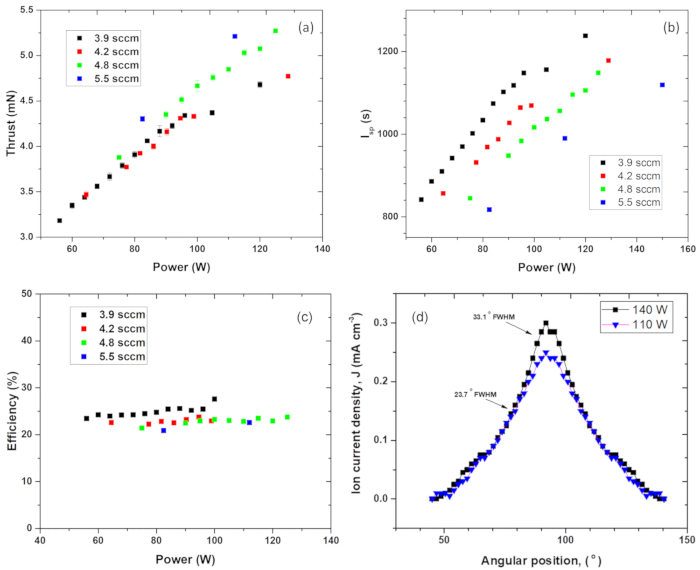
Figure 10: Evaluation of thruster characteristics. (a, b) Thrust and specific pulse as functions of input power at four different mass flow rates. (c) Efficiency plotted against the input power at different mass flow rates. (d) The automatically plotted profile of ion current density. Please click here to view a larger version of this figure.
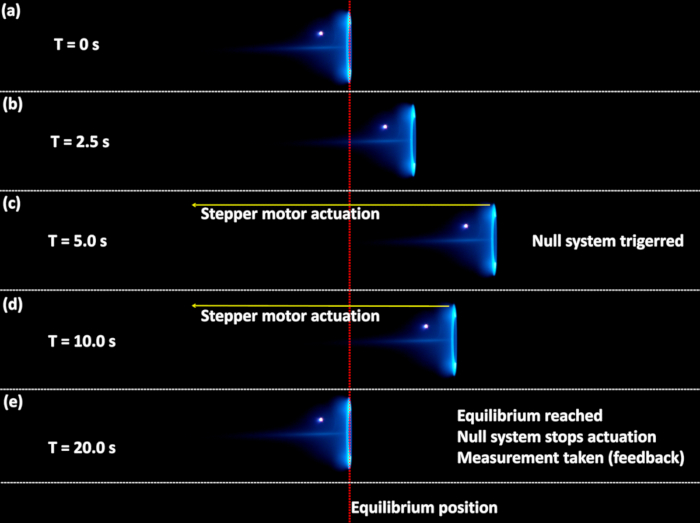
Figure 11: Time evolution of the null thrust verification unit in operation during firing of a Hall thruster at SPC-S. (a) t = 0 s, where the Hall thruster is first fired and moves away from the equilibrium position. (b) Quadfilar stage displaces to the right as shown by the relative motion of the Hall thruster. (c) Quadfilar stage stops oscillating and reaches an equilibrium steady-state position. Null system is triggered and the stepper motor actuation commences. (d) Null system is triggered to slowly pull the thruster mounted on the quadfilar stage back to equilibrium. (e) Thruster reaches an equilibrium position. Null measurement unit stops the stepper motor actuation. Measurement is taken. Please click here to view a larger version of this figure.
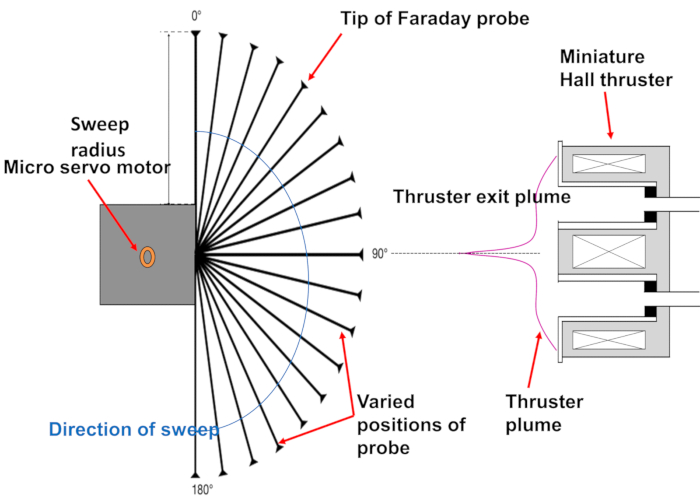
Figure 12: Schematic representation of the actuation of the modular multi-probe turret. The entire system is controlled wirelessly, and Faraday probe can be replaced quickly through snapping on a different probe module. Connections are made through BNC-type adapters for easy twist-on conversion and installation. Please click here to view a larger version of this figure.

Figure 13: Schematics of a Hall-type thruster. Similar setups with varied configurations based on a generalized layout presented in this figure have also been employed by other groups. Please click here to view a larger version of this figure.

Figure 14: Inductively Coupled Plasma Facility for synthesis of novel materials at the Plasma Sources Application Centre / Space Propulsion Centre, Singapore. A powerful plasma system enables synthesis of silicon-based materials for innovative, highly efficient solar cells, as well as boron nitride and other nanostructured materials for applications in the modern miniaturized thrusters. Please click here to view a larger version of this figure.
