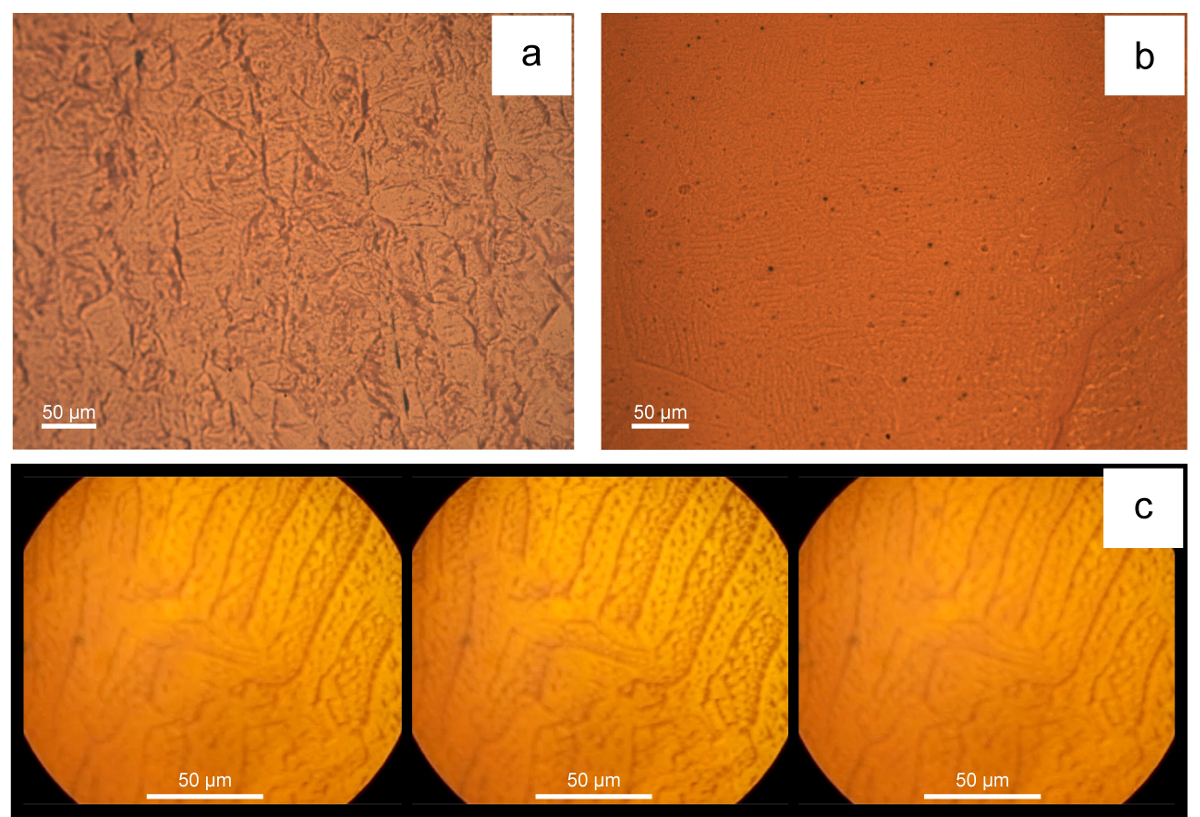
Figure 4 shows two examples of high quality static domain patterns without any applied magnetic field for an industrial-grade pure iron and a low carbon steel respectively. One can see the DWs clearly in both materials and different types of patterns including e.g. packets of parallel (or 180°) and 90° DWs, in different grains. Owing to the good quality of polishing, there are no signs of random distortion of domain patterns due to subsurface damage caused by grinding; and the results show a strong link to the microstructure. For example, the 180° DW spacing (typically about 10 µm for pure iron and about 5 µm for the low carbon steel) increases with the grain size (approximately 200 µm for pure iron and 25 µm for the low carbon steel in mean equivalent circular diameter) and the domain patterns are dependent on the grain crystallographic orientation. It should be noted that the DW thickness as observed in Bitter patterns does not reflect the real Bloch DW thickness, which is estimated to be approximately 30 nm for pure iron5. The high uniformity of the pattern quality indicates that the application of the ferro-fluid was optimal.
Figure 5 illustrates a few examples of unsatisfactory results due to poor surface preparation, Figure 5a and 5b, or if one fails to fix the sample securely during dynamic imaging or to level the sample. Note even a very small offset movement is obvious under the microscope. The video will go out of focus under the action of the applied field perpendicular to the sample surface as illustrated in Figure 5c; or the sample will oscillate laterally at the frequency of the applied field in the case of a parallel AC field being applied.
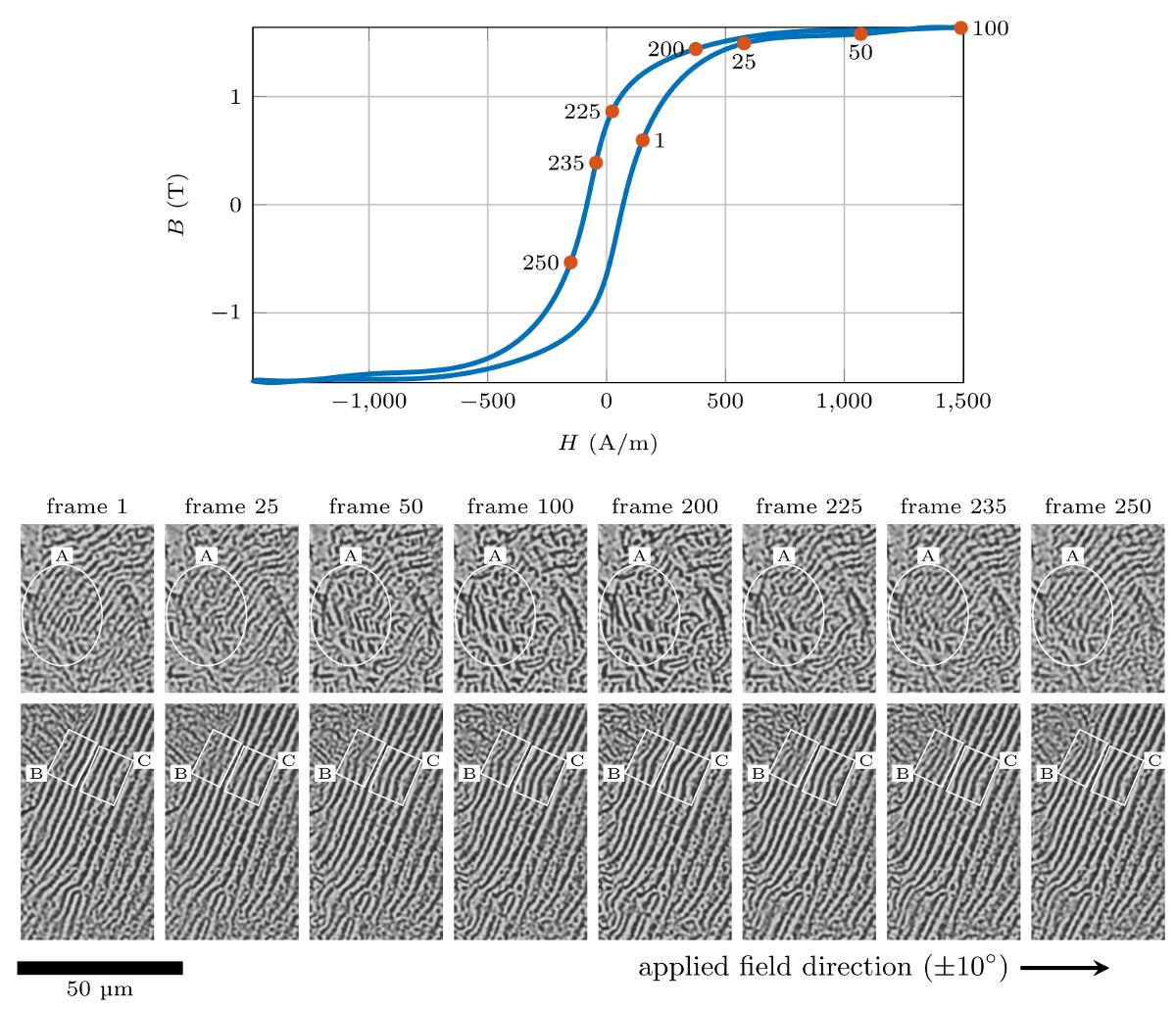
Figure 6 shows a series of domain images extracted from the DW movement process video at different points of the in situ measured BH loop. The video clearly shows a strong link between the DW movement processes and the position on the BH loop. For example, the transition of 180° DWs into 90° ones in region A occur near the 'knee' of the BH loop, i.e. between points 1 and 50 during magnetization; and the process reverses between points 225 and 250 during demagnetization, which indicates the domains rotating towards the applied field direction. It is interesting that the majority of 180° DWs in the bottom series of images do not move significantly. The reason for this is unclear. One possibility may be that the applied field direction, which happens to be approximately perpendicular to domain directions and therefore can neither cause the 180° DWs to move nor rotate the domains to align with the field direction. However, the segments marked in region B bulge leftwards and rightwards during magnetization and demagnetization respectively whilst in region C bulges only slightly leftwards. These phenomena seem to indicate there may be subsurface particles or inclusions disrupting the local domain directions to have component parallel with the applied field and hence move under its action. It is also indicative that the magnetization is not fully saturated. Further analysis of the domain direction and microstructural characterization of crystallographic orientation of the grain and of any subsurface particles are needed.

Figure 1: Drawings of the sensor and specimen parts for in situ domain imaging (unit: mm). Please click here to view a larger version of this figure.

Figure 2: Schematic assembly drawing of the in situ domain imaging rig 4. (a) Separate parts before being assembled (b) finished assembly. Please click here to view a larger version of this figure.

Figure 3: Schematic of the components and connection of the in situ domain imaging system. Please click here to view a larger version of this figure.

Figure 4: Static domain patterns for pure iron and a 0.2 wt% carbon steel. Please click here to view a larger version of this figure.

Figure 5: Examples of unsatisfactory domain patterns resulting from failing to follow the protocols properly. (a) disordered domain pattern (same low carbon steel sample as the one in Figure 3) lacking links to microstructure due to poor sample surface preparation; (b) obscure pattern with poor contrast due to poor application of the ferro-fluid on an as-cast extra-low carbon steel sample; (c) domain patterns going out of focus under the action of the perpendicular field of a pure iron sample Please click here to view a larger version of this figure.

Figure 6: A series of domain images extracted from the domain wall movement process video at frames corresponding to a series of points on the in situ measured BH loop with marked regions of interest showing domain rotation and likely interactions with microstructural features of an as-cast extra-low carbon steel sample. Please click here to view a larger version of this figure.

{kind=link}
{kind=link}
{kind=link}
{kind=link}