지각과 지각 학습 유학을위한 객체와 객체 카테고리 만들기
概要
우리는 정확하게 정의 된 기능 변화와 자연 3-D 개체와 개체 카테고리를 만들기위한 새로운 방법을 설명합니다. 우리는 morphogenesis 다음 Visual 이미지 나 haptic 개체로 렌더링 할 수있는 소설, 자연 가상 3-D 개체와 개체 카테고리를 만들 계통 발생 론의 생물학적 과정의 시뮬레이션을 사용합니다.
Abstract
양적 객체 인식을 연구하기 위해, 생물 시스템이나 기계, 속성 1, 바람직 자연, 정확하게 정의와 개체와 개체 카테고리를 생성 한 요구에 의해 그 인식합니다. 또한, 지각 학습에 대한 연구를 위해, 그것은 이러한 속성을 2 소설 개체와 개체 카테고리 (또는 개체 클래스)를 만들 때 유용합니다.
많은 혁신적이고 유용한 방법은 현재 새로운 개체와 개체 카테고리 3-6 (또한 심판이 판결을 참조하십시오. 7,8)을 만드는 존재합니다. 그러나, 일반적으로 기존의 방법은 결점 세 광범위한 종류를 가지고 말하기.
첫째, 형상 변화는 일반적으로 실험 5,9,10가 부과되며, 따라서 자연 카테고리의 다양성 다를 수 있습니다, 그리고 특정 인식 알고리즘에 최적화 된. 그것은 유사 콘텐츠가 exte 독립적으로 발생해야하는 것이 바람직 할 것rnally 제약 조건을 부과.
둘째, 기존의 방법은 어려움이 자연물 11-13의 형상의 복잡성을 캡처 수 있습니다. 목표는 자연 객체 인식을 공부하는 경우, 가능 confounds 및 특별한 경우를 방지 할 수 있도록, 개체와 자연이 될 객체 카테고리에 바람직하다.
셋째, 그것은 양적 종래의 방법에 의해 생성 된 자극에 사용할 수있는 정보를 측정하는 것이 어렵습니다. 그것은 가능한 정보를 정확하게 측정 할 수있는 개체와 개체 카테고리를 생성하는 것이 바람직이어야하며, 필요한 경우, 체계적으로 (또는 '조정') 조작. 것 이 하나가 양적 측면에서 기본 객체 인식 작업을 책정 할 수 있습니다.
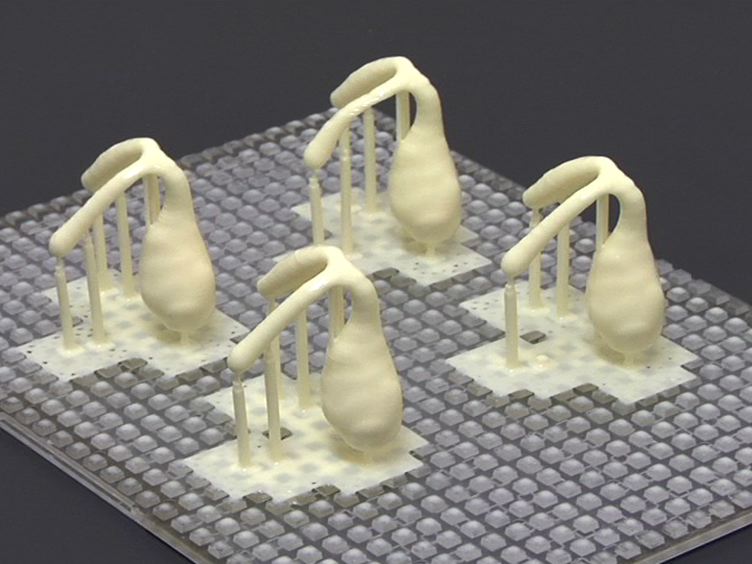
여기서 우리는 위의 조건이 모두 세 충족 알고리즘 또는 방법의 집합을 설명합니다. 가상 morphogenesis (VM)은이 '디지털 배아'이라는 소설 자연 가상 3-D 객체를 생성embryogenesis (14)의 생물학적 과정을 시뮬레이션. 가상 계통 발생 론 (VP)는 자연 선택 9,12,13의 진화 과정을 시뮬레이션하여 소설 자연 객체 카테고리를 만듭니다. 이 시뮬레이션에 의해 만들어 객체와 객체 카테고리가 추가로 형상 특성 15,16의 체계적 변화를 생성하기 위해 다양한 변형 방법으로 조작 할 수 있습니다. VP과 방법을 변형도 디지털 배아가 아닌 다른 소설 가상 개체에, 또는 실제 개체 9,13의 가상 버전, 원칙적으로 적용 할 수 있습니다. 이 방식으로 만든 가상 객체는 표면 질감, 조명, 크기, 시점과 배경의 원하는 조작으로 기존의 그래픽 툴킷을 사용하여 시각적 이미지로 렌더링 할 수 있습니다. 가상 개체는 또한 기존의 3-D prototyper를 사용하여 haptic 개체로 '인쇄'할 수 있습니다.
우리는 또한 illus 도움이 계산 알고리즘의 일부 구현을 설명알고리즘의 잠재력 유틸리티를 trate. 그것은 그들의 구현에서 알고리즘을 구별하는 것이 중요합니다. 구현은 기본 알고리즘의 '원칙의 증거'로 단독 제공 데모입니다. 그것은 일반적으로 계산 알고리즘의 구현은 종종 알고리즘 자체는하지 않는 한계를 가지고 있습니다하는 것이 중요합니다.
함께 이러한 방법은 모두 생물 및 전산 시스템에 의한 객체 인식 및 지각 학습을 공부에 대한 강력하고 유연한 도구의 집합을 나타냅니다. 적절한 확장을 통해 이러한 방법은 morphogenesis와 계통 발생 론의 연구에 유용 할 수 있습니다.
Protocol
Representative Results
Discussion
인지 과학 연구의 VM 및 VP의 유용성
우리는 이전에 세부 l9 ,10,12-14에 VM과 VP의 유용성을 설명하고 있습니다. 이 소설을 만들기위한 원칙과 유연성 방법하지만, 자연 3-D 개체 14을 제공하기 때문에 간단히, VM, 특히 디지털 배아 방법이 유용합니다. 마찬가지로, VP는 자연 범주에게 9,10,12,13를 만드는 원리 방법을 제공합니다. 이 카테고리는 자연 계층 경향, 그리고 내 및 카테고리에서 기능 변화가 분류하기위한 독립적으로 실험과 알고리즘의 발생 사실 등의 자연 속에서 객체 범주와 VP 공유 많은 기능에 의해 생성 된 객체의 카테고리를 지적 가치 그 39.
현재 제한 사항 및 향후 방향
미래의 일에 대한 프로토콜과 방향의 세 가지 현재의 제한은 그들이 제안하는특히 주목할만한 위치 : 첫째, VM 및 VP 모두 생물학적 과정을 시뮬레이션. 우리는 비 생물학적 가상 개체가이 프로세스를위한 기판으로 사용할 수 있습니다 것을 보여 있지만, 기본 프로세스는 여전히 생물학적 동기입니다. 그러나, 자연물 – 모두 생물과 비 생물이 – 비 – 생물학적 힘에 의한 형태 변화를 거칩니다. 예를 들어, 바위 때문에 이러한 침식이나 침전 등의 지질 학적 프로세스 형태로 변경 될 수 있습니다. 바위의 새로운 카테고리가 다른 같은 지질 학적 과정에서 발생할 수 있습니다. 그것은 가능한 형태 변경 알고리즘의 레퍼토리로 이러한 프로세스를 통합 할 수 비교적 간단해야합니다.
우리 프로토콜의 두 번째 주요 제한은 동적 형상 변경 현재 레퍼토리가 오히려 제한된다는 점입니다. 이 같은 생물학적 움직임, 또는 바람, 물이나 중력 같은 외부 힘에 의한 운동과 같은 형태의 변화 큰 배열을 포함하는 것이 바람직하다. 우리는 wil 기대제가 동적 형상 변경 사항을 구현하기 위해 알려진 컴퓨터 애니메이션 알고리즘을 데려 올 상대적으로 간단합니다.
우리 프로토콜의 세 번째 주요 제한은 VM이 현재 gastrulation 36, 특히, 등 많은 다른 알려진 morphogenetic 프로세스를 포함하지 않습니다 것입니다. 또한 때문에 세포 벽 (36)의 같은 공장에서 morphogenesis이 가능한 거의 없거나 전혀없는 셀 운동, 성장에 의해 완전히 매개되어 있다는 사실로 알려진 제약, 통합되지 않습니다. 마찬가지로, VP는 유전자 표류 40 다른 알려진 phylogenetic 프로세스가 포함되어 있지 않습니다. 이러한 한계를 해결하면 발달, 생태 및 진화 시뮬레이션에서의 프로토콜의 사용을 촉진 크게 도움이 될 것입니다.
開示
The authors have nothing to disclose.
Acknowledgements
이 작품은 미국 육군 연구소와 미 육군 연구 사무실 부여 W911NF1110105 및 NSF 부여 IOS-1147097to 제이 Hegdé에 의해 부분적으로 지원되었다. 지원 또한 조지아 보건 과학 대학의 비전 발견 연구소에서 제이 Hegdé에 파일럿 보조금에 의해 제공되었다. 다니엘 Kersten은 교부금 ONR N00014-05-1-0124와 NIH R01 EY015261 의해 일부 한국의 국립 연구 재단을 통해 교육 과학 기술부의 지원을받는 WCU (세계 클래스 대학) 프로그램 (R31-10008에 의해 지원되었다 ). 카린 Hauffen는 미국 육군의 학부 연구 견습 프로그램 (URAP)에 의해 지원되었다.
Materials
| Name of toolkit/equipment | Company / Author | Catalogue # | コメント |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. |
参考文献
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Fahle, M., Poggio, T. . Perceptual Learning. , (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a “Greeble” expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Bart, E., Hegdé, J., Kersten, D. Fragment-based learning of visual categories. , 121-12 (2008).
- Ball, P. . Nature’s patterns : a tapestry in three parts. , (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. . Numerical geometry of non-rigid shapes. , (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. . Pattern classification. , (2001).
- Bishop, C. M. . Pattern recognition and machine learning. , (2006).
- Theodoridis, S., Koutroumbas, K. . Pattern recognition. , (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , (2011).
- Tuffery, S. . Data mining and statistics for decision making. , (2011).
- Crawley, M. J. . Statistical Computing: An Introduction to Data Analysis using S-Plus. , (2002).
- Venables, W. N., Ripley, B. D. . Modern Applied Statistics with S. , (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. . Warping and morphing of graphical objects. , (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. . Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. . Computer graphics. , (2011).
- Lengyel, E. . Mathematics for 3D game programming and computer graphics, third edition. , (2011).
- Gilbert, S. F. . Developmental biology. , (2010).
- Gilbert, S. F., Epel, D. . Ecological developmental biology : integrating epigenetics, medicine, and evolution. , (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. . Evolution. , (2009).