This study has been approved by the Human Ethics Committee of Ningbo University (ARGH20150356). All subjects gave their informed consent for inclusion in the study, and they were informed of the goal, requirements, and experimental procedures of the study.
1. Gait Laboratory Preparation
- Switch off any incandescent lights and leave a reasonable fluorescent lighting level in the laboratory. Remove all markers and unwanted objects of reflection that may be misinterpreted as passive retro-reflective markers from the capture volume.
- Plug the appropriate dongle into the parallel port of the computer. Turn on the motion-capture cameras, proprietary tracking software, force platform amplifiers, and external analog-to-digital converter (ADC).
- Allow time for the 8 cameras to initialize. Click the "Local System" node on the "System" tab of the "Resources" pane. In the "Properties" pane of the "Local System" node, type "100" into the "Requested Frame Rate" property in the "System" section to set sample rate at 100 Hz.
- Select "Camera" from the view list in the "View" pane. Place the T-frame, which consists of 5 markers located a fixed distance from each other, on the force platform.
- In the "System Resources" tree, expand the "Cameras" node and press and hold the CTRL key while clicking each camera listed in the node. In the "Properties" pane of the "Cameras" node, move the "Strobe Intensity" bar in the "Settings" section to the left or right for each camera to ensure that data from each camera is completely, clearly, and steadily visible in the "View" pane.
- Click the "System Preparation" button in the "Tool" pane. Click the "Start" button in the "Calibrate Cameras" section and thenphysically wave the calibration wand (T-frame) in the capture volume in a vertical figure eight whilst moving around the area intended for the capture of 3D data. Stop waving when the blue status lights on the front of the cameras stop flashing.
- In the "Cameras Calibration Feedback" section in the "Tool" pane, monitor the progress bar until the camera calibration process is complete. Review the "Image Error" data; the acceptable image error of each camera should be less than 0.3.
- Place the T-frame on the floor, with the central marker on the top-left corner of the force platform (60 cm × 90 cm) and the axes of the frame along the edges of the force platform. Ensure that the long axis of the frame points in the travel direction (anterior direction).
- Select "3D Perspective" from the view list in the "View" pane. In the "Set Volume Origin" section, click the start button and click the "Set Origin" button to set the origin of the capture volume.
- Ask a subject to step onto the force platform. Verify that the direction of the ground reaction vector displayed in the view pane is upward and that the magnitude of the vertical force component is equal to the body mass x 9.81. Ask the subject to walk away from the force platform.
- In the "System Resources" tree, right-click on the "Force Platform" node and select "Zero Level" from the "Context" menu to calibrate the force platform. Click the "Connectivity" node on the "System" tab in the "Resources" pane. In the "Properties" pane of the "Connectivity" node, type "1,000" into the "Requested Frame Rate" property in the "Settings" section to set the sample rate at 1,000 Hz.
- Prepare 16 passive retro-reflective markers (diameter: 14 mm) by pre-attaching them individually to one side of double-sided adhesive tape.
2. Subject Preparation
- Organize the results of the survey about high-heel shoe-wearing experience, including frequency, duration, heel types, and heel heights, which should be given to each volunteer.
NOTE: Questions in the survey: (i) How often do you wear your high-heeled shoes? (ii) How many h/min do you wear your high-heeled shoes each time? (iii) What kind of high-heeled shoes do you usually wear? Wedge heel or stiletto heel? (iv) How high is the shoe that you usually wear? Here, 36 young females volunteered to participate in this test, but 14 of them were excluded for assorted reasons: feeling uncomfortable with the experimental shoe (4), hallux valgus (3), only having wedge-heel experience (3), abnormal gait in the experimental environment (2), and absence on the testing day (2). - Obtain written informed consent from subject who fulfill the inclusion criteria.
NOTE: The inclusion criteria are as follows: no musculoskeletal disorders that might affect normal jogging and running gait; feeling comfortable with the experimental shoe offered; right-foot dominant; and size 37 (EUR) EW (age: 24.2 ± 1.2 years; height: 160 ± 2.2 cm; mass: 51.6 ± 2.6 kg) wear shoes with narrow heels 3-6 cm-high for a minimum of three days per week (6 h per day) for at least two years, while IEW (age: 23.7 ± 1.3 years; height: 162.3 ± 2.3 cm; mass: 52.6 ± 4.5 kg) wear high-heeled shoes less than twice per month. - Ask the subjects to change into tight-fitting pants and a t-shirt.
- Measure subjects' standing height (mm) and body mass (kg). Measure the leg length (i.e., the distance between the superior iliac spine and the ankle internal condyle, in mm), knee width (i.e., the distance between the medial and lateral knee condyle, in mm) and ankle width (i.e., the distance between the medial and lateral ankle condyle, in mm) using measuring calipers.
- Prepare skin areas of anatomical bony landmarks for marker placement.
- Shave body hair as appropriate and use alcohol wipes to remove excess sweat and moisturizer.
NOTE: The marker locations include: anterior-superior iliac spine (LASI/RASI), posterior-superior iliac spine (LPSI/RPSI), lateral mid-thigh (LTHI/RTHI), lateral knee condyle (LKNE/RKNE), lateral mid-shank (LTIB/RTIB), lateral malleolus (LANK/RANK), second metatarsal head (LTOE/RTOE), and calcaneus (LHEE/RHEE), where the L and R prefixes indicate the left and ride legs, respectively.
- Shave body hair as appropriate and use alcohol wipes to remove excess sweat and moisturizer.
- Palpate to identify anatomical landmark. Circle each landmark on the skin using a marking pen. Attach the 16 passive retro-reflective markers on the landmarks of both sides of the lower limbs with double-sided adhesive tape.
- Ask the subjects to change into the experimental shoe (heel height: 4.5 cm) and then walk, jog, and run freely along the runway until they are physiologically and psychologically comfortable with the cameras and markers on their lower limbs (i.e., no influence on the participants) and they feel like they are walking, jogging, and running naturally.
- Ask the subjects to practice jogging along the runway at a comfortable low speed until they are able to jog steadily. Instruct the subjects to perform some progressive training (e.g., making an effort to jog at a progressively increasing speed on a treadmill within a safe and comfortable range).
- Ask them to practice running on the ground along the runway at a comfortable high speed until they are able to run steadily at this speed.
- Instruct the subjects to try to start jogging/running from different starting lines within the starting area several times to find an appropriate starting position, ensuring that the right foot naturally strikes and completely contacts the force platform when passing by.

Figure 1: Experimental protocol. 8 infrared cameras capture lower-limb motion while the subject jogs and runs along the runway. The right foot naturally strikes and completely contacts the force platform when passing by. Kinematic and kinetic data were collected synchronically. Please click here to view a larger version of this figure.
3. Static Calibration
- Click the "New Database" button in the toolbar to create a new database. Click the "Data Management" button in the toolbar to open the "Data Management" pane. In the "Data Management" pane, click the "New Patient Classification," "New Patient," and "New Session" buttons, in order. Return to the "Resources" pane, click the "Create a new subject" button to create a new subject, and enter the values for all anthropometric measurements (e.g., height, weight, leg length, knee width, and ankle width) in the "Properties" pane for the newly created subject.
- Click the "Go Live" button in the "Resources pane." Click the "Split horizontally" button in the "View" pane and select "Graph" in the view list in the new "View" pane. Select "Trajectory Count" in the "Model Output" pulldown list.
- Confirm that the count of markers in the "Graph" view pane is 16 and that the same number of markers is visible in the "3D Perspective" view pane, meaning that no markers on the lower limb have failed to be captured.
- Click the "Subject Preparation" button in the "Tool" pane.
- Ask the subject to stand in a stationary neutral pose in the center of the capture volume to capture the static data.
- Click the "Start" button in the subject capture section, capture approximate 150 frames, and click the "Stop" button.
NOTE: The "Start" button switches to "Stop" automatically after clicking it.
- Click the "Start" button in the subject capture section, capture approximate 150 frames, and click the "Stop" button.
- Click the "Reconstruct" button in the toolbar to display the captured markers. Click the "Label" button in the "Tool" pane and manually assign the labels (16 in total) listed in the "Manual Labeling" section to the corresponding markers in the "3D Perspective" view pane. Press the "Esc" key on the keyboard to exit.
- Select "Static" in the "Pipeline" pulldown list in the "Subject Calibration" section. Check the "Left Foot" and "Right Foot" options in the "Static Settings" pane. Click the "Start" button in the "Subject Calibration" section.
4. Dynamic Trials
- Ask the subject to stand at the appropriate starting position.
- Click the "Go Live" button in the "Resources" pane. Click the "Capture" button in the "Tool" pane. Edit the "Trial Name" in the "Next Trial Setup" section.
- Click the "Start" button in the "Capture" section to begin capturing and then immediately give the subject the oral instruction to "Go jogging/Go running." Ensure that the right foot naturally strikes and completely contacts the force platform when passing by ( Figure 1).
- For jogging trials, ask the subjects to jog at the comfortable low speed that they were familiar with during preparation; for running trials, ask the subjects to run at the comfortable high speed that they had been familiar with during preparation. Allow for a 2-min rest between two trials.
- Capture at least 3 complete successive steps, including the step on the force platform.
NOTE: Jogging and running trials are performed randomly. For each speed, ask the subjects to repeat 5 trials. Cancel the capture in the event of a marker moving/falling or if abnormal gait occurs. In the event of markers moving/falling, re-attach to the predetermined skin mark.
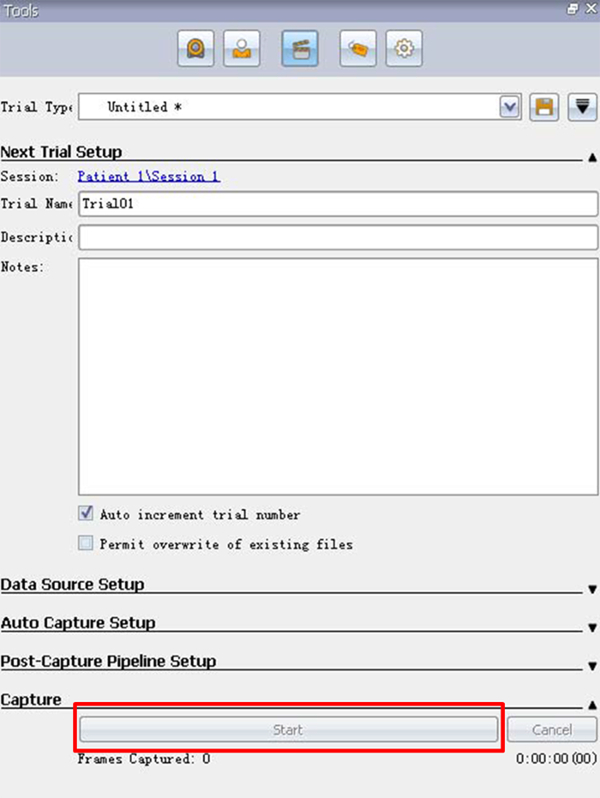
Figure 2: User interface for dynamic data collection. Please click here to view a larger version of this figure.
- Click the "Stop" button in the "Capture" section after the subject jogs/runs to the end of the runway. See Figure 2.
NOTE: The "Start" button in the "Capture" section switches to "Stop" automatically after clicking it.
5. Post-processing using Proprietary Tracking Software
- Click the "Data Management" button in the toolbar. In the "Data Management" pane, double-click the trial name. Click the "Reconstruct" and "Label" buttons in the toolbar to reconstruct the 3D dynamic model and to obtain the filmed data.
- On the time bar, move the left-range indicator (blue triangle) on the timeline to the frame at which the right foot strikes the force platform. Select this frame according to the instant when the vertical force vector in the view pane arises.
- Move the right-range indicator (blue triangle) on the timeline to the frame at which the next heel-strike event of the right foot occurs.
NOTE: The selection of this frame depends on the elaborative subjective estimate of the researchers according to the instant when there is no superior-inferior displacement of the right heel marker.
- Move the right-range indicator (blue triangle) on the timeline to the frame at which the next heel-strike event of the right foot occurs.
- Right-click on the time bar and select "Zoom to Region-of-Interest" from the "Context" menu to define the desired frames.
- Click the "Label" button in the "Tool" pane. In the "Gap Filling" section, click on the markers whose trajectories contain gaps listed in the "Trajectory" column and then click the "Fill" button of the "Spline Fill" tool.
NOTE: The number of gaps are listed in the "#Gaps" column. Clicking on the "Fill" button of the "Spline Fill" tool fills one gap. The "Spline Fill" method can generally be used for gap instances less than or equal to 60 frames. - Click the "Pipeline" button in the "Tool" pane. Select "Dynamic" from the "Current Pipeline" list. Move the indicator (blue slider) along the timeline to the last frame. Click the "Run" button to start the pipeline process and export dynamic trials in.csv format for post-processing in the data analysis software.
6. Data Analysis
- Low-pass filter the kinematic and kinetic data using 4th-order Butterworth filters with cut-off frequencies at 10 Hz and 25 Hz, respectively13 (see the Table of Materials).
- Divide the anterior-superior displacement of the marker on the right anterior superior iliac spine by the corresponding time to calculate the jogging/running speed.
- Define the anterior-posterior displacement of the marker on right heel between the successive heel-strike events as the stride length. Define the reciprocal of the duration of the gait cycle as the stride frequency.
- Define the difference between the peak angle and valley angle during the stance phase as the joint range of motion (ROM).
- Calculate the vertical average loading rate by defining the slope of the vertical GRF-time curve from 20-80% of the stance time from initial contact to impact force14.
NOTE: Define the initial contact as the instant when the vertical GRF consistently measured more than 0 N. - Normalize the vertical GRF to bodyweight (BW%).
- First average the 5 trials from each subject and then average these results for all subjects.
NOTE: The parameters include jogging and running speed, stride length, stride frequency, joint (i.e., ankle, knee and hip) 3D (ROM) and peak angle during stance phase, angle at heel-strike in the sagittal plane, impact force (Fi), peak force (Fp), and vertical average loading rate (VALR). - Transfer the data to a statistical software for statistical analysis.
7. Statistical Analysis
- Perform two separate independent samples t-tests to assess the effects of wearing experience. Perform two separate paired-samples t-tests to assess the effects of running speed on lower-limb kinematics and GRF. Consider statistical results as significant if p <0.05.
All results are presented here as the mean ± standard deviation. The running speed was significantly greater than the jogging speed, regardless of wearing experience (EW: Jog vs. Run: 2.50 ± 0.14 vs. 3.05 ± 0.14, p = 0.010; IEW: Jog vs. Run: 2.24 ± 0.26 vs. 2.84 ± 0.29, p = 0.028; in m/s) (Table 1). No significant difference in the corresponding jogging/running speeds between EW and IEW was found. Generally, the stride length of EW was larger than that of IEW (Jog: EW vs. IEW: 1.86 ± 0.06 vs. 1.49 ± 0.20, p = 0.016; Run: EW vs. IEW: 2.15 ± 0.14 vs. 1.79 ± 0.16, p = 0.004; in m), while the stride frequency showed the opposite (Jog: EW vs. IEW: 82.43 ± 3.48 vs. 90.74 ± 2.92, p = 0.024; Run: EW vs. IEW: 85.84 ± 3.39vs. 96.16 ± 3.00, p = 0.015; in steps/min) (Table 1). IEW showed a significantly larger stride length (p = 0.025) and frequency (p = 0.010), and EW showed significantly larger stride length (p = 0.017), while running as compared to jogging.
In the sagittal plane, statistical results from paired independent t-tests showed that the ankle ROM of EW was significantly less than that of IEW (Jog: EW vs. IEW: 39.40±4.44 vs. 47.88±2.59, p=0.000; Run: EW vs. IEW: 36.16±2.42 vs. 43.89±3.70, p=0.006; in degrees) (Figure 3). Also, the ankle plantar-flexion at heel-strike of EW was significantly less than that of IEW (Jog: EW vs. IEW: -10.95 ± 2.15 vs. -14.34 ± 2.31, p = 0.014; Run: EW vs. IEW: -9.97 ± 0.85 vs. -13.63 ± 0.72, p = 0.011; in degrees) (Table 3). The knee ROM of EW during jogging was significantly larger compared to that of IEW (Jog: EW vs. IEW: 30.37 ± 2.11 vs. 29.90 ± 2.67, p = 0.030; Run: EW vs. IEW: 30.97 ± 0.86 vs. 30.16 ± 1.79; in degrees) (Figure 3). On the contrary, the knee peak flexion of EW during jogging was significantly less (Jog: EW vs. IEW: 39.47 ± 1.80 vs. 45.01 ± 2.04, p = 0.017; Run: EW vs. IEW: 42.73 ± 2.13 vs. 44.16 ± 2.07; in degrees) (Table 2). The hip peak flexion (Jog: EW vs. IEW: 27.70 ± 2.82 vs. 27.69 ± 4.00; Run: EW vs. IEW: 36.02 ± 2.94 vs. 29.15 ± 4.10, p = 0.000; in degrees) and flexion at heel-strike (Jog: EW vs. IEW: 27.54 ± 2.84 vs. 27.61 ± 3.92; Run: EW vs. IEW: 35.99 ± 2.96 vs. 29.09 ± 4.10, p = 0.000; in degrees) of EW during running were significantly larger compared to those of IEW (Table 2 and Table 3). In addition, statistical results from paired sample t-tests showed that IEW presented significantly less plantar-flexion at heel-strike (Jog vs. Run: -14.34 ± 2.31 vs. -13.63 ± 0.72, p = 0.044; in degrees) (Table 3) and EW presented significantly larger hip ROM (Jog vs. Run: 39.22 ± 3.73 vs.46.12 ± 3.88, p = 0.010; in degrees), peak flexion (Jog vs. Run: 27.70 ± 2.82 vs. 36.02 ± 2.94, p = 0.000; in degrees), and flexion at heel-strike (Jog vs. Run: 27.54 ± 2.84 vs. 35.99 ± 2.96, p = 0.000; in degrees) while running as compared to jogging (Figure 2, Table 2, and Table 3).
In the frontal plane, the ankle ROM (Jog: EW vs. IEW: 4.90 ± 0.48 vs. 6.66 ± 0.26, p = 0.001; Run: EW vs. IEW: 5.76 ± 0.46 vs. 6.30 ± 0.44; in degrees) and peak inversion (Jog: EW vs. IEW: 5.51 ± 0.40 vs. 7.51 ± 0.43, p = 0.022; Run: EW vs. IEW: 6.80 ± 0.23 vs. 7.73 ± 0.33, p = 0.040; in degrees) of EW was less compared to those of IEW, and significant differences existed in the ROM during jogging and peak inversion during jogging and running (Figure 2 and Table 2). The knee showed similar results to the ROM (Jog: EW vs. IEW: 7.23 ± 2.17 vs. 11.27 ± 1.20, p = 0.010; Run: EW vs. IEW: 9.19 ± 1.15 vs. 11.04 ± 1.63; in degrees) and peak abduction (Jog: EW vs. IEW: 4.57 ± 0.60 vs. 5.16 ± 0.58; Run: EW vs. IEW: 5.84 ± 0.69 vs. 7.12 ± 0.89; in degrees) with the ankle, but significant a difference only existed in the ROM during jogging (Figure 2 and Table 2). As to the hip, only the peak abduction showed a significant difference between EW and IEW (Jog: EW vs. IEW: 6.80 ± 0.89 vs. 12.62 ± 1.23, p = 0.000; Run: EW vs. IEW: 7.73 ± 1.01 vs. 13.37 ± 2.07, p = 0.000; in degrees) (Table 2). When comparisons were made between jogging and running, the ankle peak inversion of EW (Jog vs. Run: 5.51 ± 0.40 vs. 6.80 ± 0.23, p = 0.042; in degrees) and the knee peak abduction of IEW (Jog vs. Run: 5.16 ± 0.58 vs. 7.12 ± 0.89, p = 0.017; in degrees) showed to be larger, with statistical significance during running (Table 2).
In the transvers plane, the running speed showed obvious effect on EW who exhibited significantly larger external rotation of the ankle (Jog vs. Run: -23.58 ± 1.05 vs. -26.82 ± 1.90, p = 0.023; in degrees) and the knee (Jog vs. Run: 12.13 ± 2.19 vs. 15.95 ± 1.62, p = 0.012; in degrees) while running as compared to jogging (Table 2). During running, EW also exhibited significantly less knee ROM (Jog: EW vs. IEW: 16.91 ± 2.21 vs. 18.34 ± 1.08; Run: EW vs. IEW: 16.26 ± 1.72 vs. 19.97 ± 1.26, p = 0.009; in degrees) and larger hip peak internal rotation (Jog: EW vs. IEW: 15.34 ± 1.53 vs. 14.69 ± 0.95; Run: EW vs. IEW: 16.91 ± 1.56 vs. 14.72 ± 0.99, p = 0.028; in degrees) compared to IEW (Figure 2 and Table 2).
Figure 4 shows the ensemble averages of the vertical GRF under the conditions of EW-Jog, EW-Run, IEW-Jog, and IEW-Run. The GRF-time curve of EW is characterized by an initial peak immediately followed by a small wave during the shock absorption period, particularly during running. In contrast, that of IEW is relatively fluent after the initial peak. There is no significant difference in the impact force between EW and IEW, and no significant difference was observed between jogging and running (Figure 4). Compared with IEW, EW showed significantly larger peak force, regardless of speed (Jog: EW vs. IEW: 2.42 ± 0.12 vs. 2.05 ± 0.24, p = 0.035; Run: EW vs. IEW: 2.51 ± 0.14 vs. 2.27 ± 0.12, p = 0.042; in bodyweight). The VALR presented to be the highest under the condition of EW-Run and was significantly higher than the conditions of EW-Jog (EW-Run vs. EW-Jog: 102.66 ± 4.99 vs. 62.40 ± 10.46, p = 0.000; in bodyweight%) and IEW-Run (EW-Run vs. IEW-Run: 102.66 ± 4.99 vs. 78.15 ± 17.00, p = 0.000; in bodyweight%).
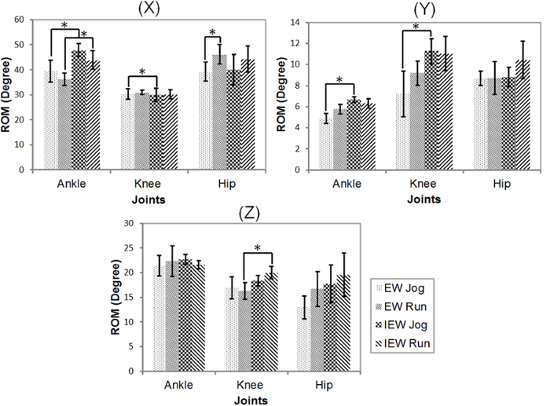
Figure 3: Joint ROM during the stance phase (EW: n=11; IEW: n=11). (X) In the sagittal plane. (Y) In the frontal plane. (Z) In the transverse plane. * Statistical significance. Error bars refer to standard deviations. Please click here to view a larger version of this figure.
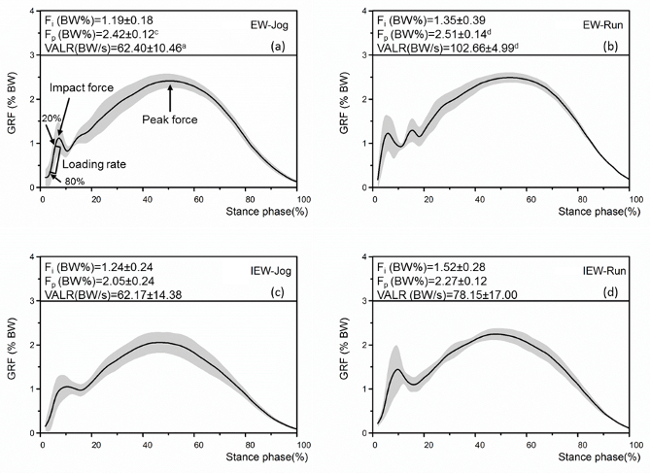
Figure 4: Ensemble averages of vertical GRF under four conditions (EW: n=11; IEW: n=11; Mean±SD). (a) EW-Jog. (b) EW-Run. (c) IEW-Jog. (d) IEW-Run. The shaded areas refer to the standard deviation. Fi represents the impact force. Fp represents the peak force. VALR represents the vertical average loading rate. BW means bodyweight. a significant difference between EW-Jog and EW-Run; c significant difference between EW-Jog and IEW-Jog; d significant difference between EW-Run and IEW-Run. Please click here to view a larger version of this figure.
| Parameters | EW (n=11) | IEW (n=11) | ||
| Jog | Run | Jog | Run | |
| Speed (m/s) | 2.50 ± 0.14a | 3.05 ± 0.14 | 2.24 ± 0.26b | 2.84 ± 0.29 |
| Stride length (m) | 1.86 ± 0.06a,c | 2.15 ± 0.14d | 1.49 ± 0.20b | 1.79 ± 0.16 |
| Stride frequency (steps/min) | 82.43 ± 3.48c | 85.84 ± 3.39d | 90.74 ± 2.92b | 96.16 ± 3.00 |
| asignificant difference between EW jog and EW run; | bsignificant difference between IEW jog and IEW run; | csignificant difference between EW jog and IEW jog; | dsignificant difference between EW run and IEW run. | |
Table 1: Spatio-temporal parameters (Mean ± SD).
| Dimensions | Joint (Degree) | EW (n=11) | IEW (n=11) | ||
| Jog | Run | Jog | Run | ||
| Sagittal plane | Ankle | 12.86 ± 2.10 | 10.64 ± 0.86 | 12.94 ± 1.88 | 10.73 ± 1.02 |
| Knee | 39.47 ± 1.80c | 42.73 ± 2.13 | 45.01 ± 2.04 | 44.16 ± 2.07 | |
| Hip | 27.70 ± 2.82a | 36.02 ± 2.94d | 27.69 ± 4.00 | 29.15 ± 4.10 | |
| Frontal plane | Ankle | 5.51 ± 0.40a,c | 6.80 ± 0.23d | 7.51 ± 0.43 | 7.73 ± 0.33 |
| Knee | 4.57 ± 0.60 | 5.84 ± 0.69 | 5.16 ± 0.58b | 7.12 ± 0.89 | |
| Hip | 6.80 ± 0.89c | 7.73 ± 1.01d | 12.62 ± 1.23 | 13.37 ± 2.07 | |
| Transverse plane | Ankle | -23.58 ± 1.05a | -26.82 ± 1.90 | -26.29 ± 1.06 | -26.73 ± 0.55 |
| Knee | 12.13 ± 2.19a | 15.95 ± 1.62 | 15.44 ± 1.52 | 15.88 ± 0.99 | |
| Hip | 15.34 ± 1.53 | 16.91 ± 1.56d | 14.69 ± 0.95 | 14.72 ± 0.99 | |
| asignificant difference between EW jog and EW run; | bsignificant difference between IEW jog and IEW run; | csignificant difference between EW jog and IEW jog; | dsignificant difference between EW run and IEW run. | ||
Table 2: Peak angle during the stance phase in three dimensions (Mean ± SD).
| Joints (Degree) | EW (n=11) | IEW (n=11) | ||
| Jog | Run | Jog | Run | |
| Ankle | -10.95 ± 2.15c | -9.97 ± 0.85d | -14.34 ± 2.31b | -13.63 ± 0.72 |
| Knee | 18.72 ± 5.87 | 24.06 ± 3.42 | 23.39 ± 2.22 | 26.34 ± 1.47 |
| Hip | 27.54 ± 2.84a | 35.99 ± 2.96d | 27.61 ± 3.92 | 29.09 ± 4.10 |
| asignificant difference between EW jog and EW run; | bsignificant difference between IEW jog and IEW run; | csignificant difference between EW jog and IEW jog; | dsignificant difference between EW run and IEW run. | |
Table 3: Joint angle at heel-strike in the sagittal plane (Mean±SD).
