1. Setting up hardware and Viewer system.
The system consists of a testing tank flanked by two monitors. A video camera connected to the BIOBSERVE Viewer system records the movement of the subject in real time. Motion data is passed to the interactive video playback (IVP) program on a separate server, which determines the motion of the animated stimulus on screen.
- Place two CRT monitors at opposite ends of an 80-l aquarium filled with clean water; match monitor output.
- Place camera overhead to capture full view of aquarium; connect to BIOBSERVE video card.
- Configure the Viewer system to receive tracking information from the camera.
- Enable plug-in to Viewer that sends the coordinates of the animal’s snout, body, and tail to animation server in real time via a specified network IP address.
- Turn on animation server.
2. Calibration.
- On the animation server, open InteractiveDisplaySetup.txt. Enter screen width and screen height in pixels under “Monitor Info”. Under “ProgramType” enter “calibration”. Save changes to file.
- Double-click on IVP program icon to start program.
- Enter in the extents of the tank dimensions as set up in the Viewer system in step 2.3. This will ensure correspondence between Viewer data and interactive output from IVP.
- Since the ends of fish tanks are smaller than the monitors, the software allows the user to use the keyboard (a and s for width, z and x for height, and arrow keys for position) to move the viewing area (viewport) of the stimuli to align with the ends of the testing tank. Viewed on the animation server, the pink viewport is echoed on one testing monitor and the blue viewport on the other (figure 1).
- Use z and x on the keyboard to scale the display of the male fish on both viewports until it matches the desired stimulus size.
- Move the boxes displayed so that they align to the edges of the test tank. The user uses the Q or W keys to move the boxes toward or away from the center of the fish.
- Enter experiment information when prompted by the program. The user has the option of selecting among preloaded models (in our demonstration, courting male Xiphophorus birchmanni, X. malinche). The user also specifies the behavior of each fish in each stage (non-interactive or interactive), the side and stage in which each stimulus will appear, and the desired size (standard length) of each stimulus.
- The next question asks if the user wants the fish movements to be mirrored, i.e. that the movement of the model on either side of the aquarium will be exactly the same. This is only used when fish are both in animation mode. The final questions concern the movement of the dorsal fin. The user can select default dorsal; this would make the dorsal only raise during a lateral courtship display. If the dorsal is not set to default, the user can decide if the model raises its dorsal fin according to the distance of the subject from the monitor.
3.Starting IVP for mate-choice test.
- Open InteractiveDisplaySetup.txt and set “ProgramType” to liveTesting and set ‘experimentName’ to the same file name that contains the Experiment Data.
- Gently place subject fish in aquarium and wait 10 min.
- Start the Viewer 2.0 and the IVP.
4. Mate-choice trial.
The overall experimental sequence follows previous studies using non-interactive video stimuli1-4. Females are presented with two different stimuli on monitors at opposite ends of a testing aquarium. Female behavior is tracked in real-time by the Biobserve Viewer system. The response assay is association time, the amount of time that a female spends within 10 cm of one monitor or the other. Association time is automatically computed by the Viewer.
- The video stimuli are displayed to subjects in a trial consisting of two, 20-minute stages. A stage consists of four 5-minute segments:
- The first segment acclimatizes the female to the test tank for five minutes by displaying a monochromatic screen on both monitors.
- In the second segment, two different video stimuli are displayed to the female, one on the left monitor and the other on the right for five minutes.
- Immediately following the display of the video stimuli, a monochromatic screen is again displayed on both monitors for five minutes.
- In the fourth and final segment, stimuli from the second segment are presented, but the position of each stimulus is switched. This provides a within-female control for side bias.
- The second stage repeats the same pattern, with a different set of simultaneously-presented stimuli.
- Additional trials are run by returning to step 2 and systematically varying side and order of presentation.
5. Representative Results.
We evaluated the effectiveness of interactive playback by comparing female response to interactive and non-interactive animations of courting males. The non-interactive stimulus performed a courtship stimulus onscreen, independent of female behavior, as in previous studies1-4.
The interactive stimulus tracked the horizontal position of the female across the screen. The position of either the simulated fish or the subject fish was operationally defined as the midpoint of the line connecting the centroid and the snout. The three rules guiding male behavior were as follows, where the X direction refers to the length of the tank, and the Z direction refers to the width of the tank (figure 2):
Rule 1: The simulated male always follows the subject across the screen, tracking her in the Z direction.
Rule 2: The simulated male’s dorsal fin is only raised when it is performing a lateral courtship display.
Rule 3: The simulated male swordtail fish will only perform a lateral courtship display for 50% of the total time it is being displayed to the female. The lateral courtship display is triggered by the male fish being within one-fourth male body length of the female fish in the Z direction. The lateral courtship display is independent of how close the female is to the monitor in the X direction.
The interactive stimulus closely tracked the female’s position in real time (figure 3).
Previous work using non-interactive stimuli4,5 showed that female X. birchmanni strongly preferred visual signals of their own species . The non-interactive stimuli created by the IVP were equally effective at eliciting conspecific mate preferences (t = 1.923, N = 9, p = .046). When females were tested on simulated interactive conspecific and heterospecific males immediately before or afterwards in the same trial, however, they failed to show a preference (figure 4).
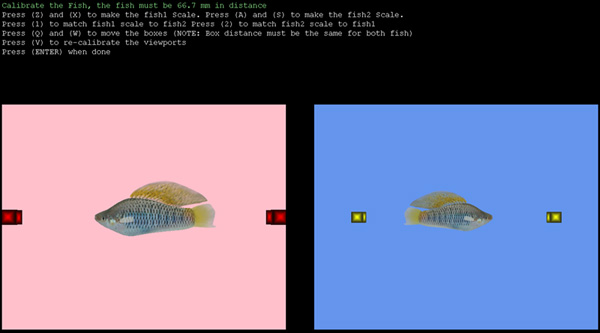
Figure 1. Monitor setup for calibration.

Figure 2. Schematic view of tank and monitor setup, indicating axes used to describe position.

Figure 3. Horizontal position of animated exemplar and representative female subject over time.
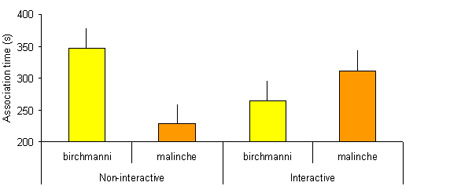
Figure 4. Association time (s) of females with interactive and non-interactive conspecific and heterospecific male stimuli. Each plot is created from a five-minute record of the positions output by the prototype. In these plots, time progresses in the vertical Y direction from 0 to 5 minutes.
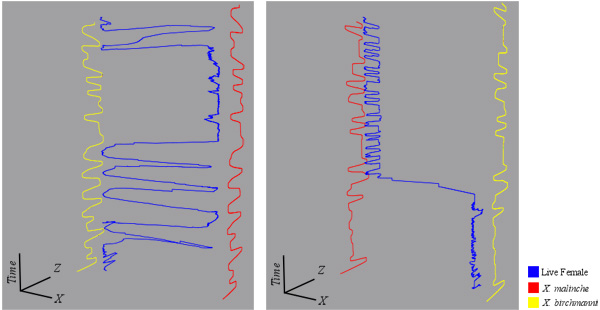
Figure 5. Representative association time data and tracking by two interactive stimuli. Two five-minute segments for two females are shown.
