1. Subject Preparation
- Measure subject’s height, weight, and record their age.
- Assess the subject’s preferred treadmill speed by having them self-adjust treadmill speed until comfortable.
- Using a felt tip pen, mark the vertex of the head as the midpoint between the nasion and inion of the subject. Additionally, mark 10% of the nasion to inion distance as a reference for aligning the cap.
2. Scalp Electroencephalography (EEG)
- Attach EEG electrodes as specified by the 10-20 international system using an EEG cap fitted to the subject as in 12. The cap ensures proper placement of the electrodes on the scalp.
- Place the EEG cap on the subject by aligning the 10% mark from step 1.3 at the midpoint of the Fp1 and Fp2 electrodes and the Cz electrode with the marked vertex. More details for placement of the cap are found in 12. Secure the cap by strapping below the chin.
- Connect EEG electrodes to the EEG control box. Starting with ground and reference electrodes, use a small syringe to inject electrolyte gel in each electrode until impedance of each measures below 25 kΩ as indicated by electrode LED turning green. Further details on EEG electrode preparation are available in 12,13.
- Connect the EEG electrodes to the wireless EEG transmitter. Secure the transmitter to the subject on a Velcro strap placed around the shoulders and connect the wireless EEG receiver to two 32 channel amplifiers.
- Connect the amplifiers to the host PC via a USB port using a fiber-optic to USB converter.
- Set EEG channel resolution to 0.1 μV, low cutoff frequency to DC, and high cutoff frequency to 1,000 Hz in the EEG data collection software.
3. Surface Electromyography (EMG)
- Prepare for EMG electrode placement at 8 muscle sites: shave skin, abrade with sandpaper, and clean with an isopropyl alcohol pad. Place electrodes on prepared sites and connect to EMG data logging unit. Place EMG ground electrode on left or right wrist, and connect to data logging unit.
4. Motion Capture
- Synchronize MARG sensors while docked according to manufacturer’s instructions.
- Remove MARG sensors and place on the subject using Velcro straps or double sided tape at locations in Table 2.
5. Environment Preparation
- Prepare treadmill by taping a diagonal line (45° from horizontal) on the belt. Place a television monitor connected to a video camera approximately 1 m in front of the treadmill. Tape a piece of paper with a 2 inch diameter black circle on the television.
- Setup walking arena by placing 5 sets of IR proximity sensors, cones, and television screen as located in Figure 3.
6. Treadmill
- Subject ascends onto treadmill. Attach safety harness.
- Prior to data collection, examine EEG and EMG signals to verify correct electrode placement, electrode connection, and data transmission.
- Begin data collection by running the C++ console application. Press the manual trigger push button to initiate EMG recording and give an audio cue (beep) to start the experiment.
- The subject stays in quiet stance for 30 sec.
- After 30 sec push trigger button to initiate walking; the treadmill is slowly accelerated to the subject’s pre-selected speed.
- The subject walks for 5 min.
- At the end of 5 min, push trigger button to initiate walk to stand transition by slowly stopping the treadmill. After coming to a stop the subject remains standing for 30 sec. Press the ‘q’ button to stop data collection trial and save the data.
- Repeat steps 6.2-6.7 for all three treadmill conditions:
- Treadmill walking while looking at black dot in distance.
- Treadmill walking while observing motion of own legs on TV monitor.
- Treadmill walking while using video feedback to avoid diagonal line on treadmill (to simulate cognitive load 6).
7. Arena Walking (1)
- Position subject at the start of the arena walking loop (Figure 3).
- Begin data collection as in 6.2-6.4.
- Push the trigger button to initiate walking. At the time the trigger is given, the first directional arrow (→, ←, or ↑) is displayed on the screen opposite the subject (Figure 3). If → or ← is observed, the subject exits the entrance set of cones, turns 90° in that direction, completes the loop and returns to the entrance cones. If ↑is observed, the subject continues straight out of the entrance cones and a manual trigger and direction arrow (→ or ←) is given when the subject reaches approximately 2 meters before the IR sensors. The subject proceeds through the first set of IR sensors and then makes the corresponding 90° turn to complete the loop, returning to the entrance cones. (During walking, the experimenter follows the subject at a distance of approximately 3-5 meters with the host PC on a wheeled cart to enhance wireless signal quality.)
- The subject continues walking when he/she reaches the entrance cones after completing a single loop. Sequence 7.3 is repeated with random ordering of arrows until 3 loops have been completed for each initial arrow (→, ←, or ↑).
- After satisfying condition 7.4, push the manual trigger button when subject reaches the entrance cones to signal transition to standing. Subject stands quietly for 30 sec and then data collection is terminated by pressing the ‘q’ button on the host PC.
8. Arena Walking (2)
- Rearrange arena walking course so that the five sets of IR sensors are positioned in a semi-circle in front of the subject (Figure 4).
- Begin data collection as with the previous trials (7.1-7.2).
- Similar to Arena Walking I, give a manual trigger to initiate walking. At the time of the trigger, one of 5 direction arrows (←, →,
 ,
,  , or ↑) is displayed on the screen. Each arrow corresponds to one set of IR sensors which are positioned around the arena (Figure 4).
, or ↑) is displayed on the screen. Each arrow corresponds to one set of IR sensors which are positioned around the arena (Figure 4). - The subject observes the arrow on the screen and walks to the corresponding set of IR sensors, making a U-turn around the cone beyond the sensors, passing through the sensors twice (Figure 4). After making the U-turn, the subject returns to the starting point and continues walking.
- Repeat sequence 8.3-8.4, with random ordering of arrows, until 3 loops have been completed for each directional arrow.
- After satisfying condition 8.6, push the manual trigger button when the subject reaches the starting point to signal transition to standing. Complete data collection as in 7.5.
9. Sit to Stand
- Position a chair behind the subject and begin data collection as in 6.2-6.3. The subject stands quietly for 15 sec at the start of data collection.
- After 15 sec, press the manual trigger button. After hearing cue subject transitions from stand to sit posture, holding sitting position until the next audio cue (button push).
- Wait a random interval (5-15 sec) and press manual trigger to give cue for sit to stand transition. Standing posture is held until the next audio cue.
- Repeat 9.2-9.3 until 10 complete stand-to-sit and sit-to-stand maneuvers are complete, after which the subject stands quietly for 15 sec. Then, terminate data collection by pressing ‘q’ button.
- Repeat the stand-to-sit protocol (9.1-9.4) for self-initiated stand-to-sit and sit-to-stand transition. Rather than giving the subject a trigger to transition, have the subject initiate the transfer own their own until 10 of each maneuver is complete.
10. Hallway Walking
- Position subject and data collection cart in the middle of 1/8th mile, straight hallway. Begin data collection as with the treadmill walking experiments (6.2-6.4). After the initial 30 sec resting period, give a manual trigger to initiate walking.
- The subject walks continuously for 5 min. When the subject reaches within 10 meters of the hallway end, he/she self-initiates a U-turn and continues walking in the opposite direction.
- At the end of 5 min push the manual trigger button to stop walking. The subject stands quietly for 30 sec while looking straight ahead. Terminate data collection by pressing the ‘q’ button.
- Begin a second hallway experiment as in 10.1.
- After a random time interval of walking (20-40 sec), give a manual trigger and audio cue to have the subject stop walking.
- The subject remains standing for short, random duration (5-15 sec).
- Push the manual trigger button to have subject resume walking.
- Repeat steps 10.5-10.7 until 10 cycles of stop-start are complete; terminate data collection as in 10.3.
Figure 5 shows 10 sec of time locked EEG, MARG, and EMG data recorded during treadmill walking (Protocol section 3). Note that each MARG senor actually records 9 signals (triaxial magnetometers, gyroscopes, and accelerometers) but only vertical acceleration is shown. The raw data in Figure 5 contain artifacts which must be accounted for during preprocessing prior to analysis and neural decoding. Examples of EEG artifacts in Figure 5 include eye blinks present at approximately 8.5 sec and low frequency motion artifact present throughout.
Figure 6 shows one complete loop (~ 35 sec) of over ground walking during the arena walking (1) protocol. Qualitatively, data from the arena over ground walking tasks contain more artifacts than treadmill walking due to the additional motion of the subject’s head and neck during turning. The facial and cranial muscle activity is particularly noticeable on the temporal electrodes (channels labeled FT and T in Figure 1) in Figure 6. Note the increase in EMG signal activity compared to treadmill walking (Figure 5), specifically in the ankle agonist-antagonist pair. Figure 6 also displays events of suboptimal wireless EEG data collection that must be accounted for during data processing. Immediately prior to the 4th trigger, EEG data show flat lines, indicating a wireless transmission interruption between the host PC and the EEG system. This section of data must be trimmed from the entire data set (EEG, MARG, and EMG).
Figure 7 shows one cycle stand-to-sit and sit-to stand data. As with other data, movement artifacts are present in EEG, both during the end of the transition and as the head is steadied as sitting (or standing) is maintained. One interval of hallway walking including stand-to-walk and walk-to-stand transition is shown in Figure 8. Note the ramping of EMG and acceleration data after the audio cues to start and stop walking. Coincident with this ramping is the appearance and disappearance of motion artifact in the EEG data. Figure 8 also displays a suboptimal connection on EEG electrode PO10 which occurs at approximately 7 s. This behavior is occasionally observed during the experiment and is likely due to loss of contact between the EEG electrode and the scalp. Electrode PO10 must be removed from the data analysis for this trial. Because EEG data can be observed in real time, and connection of EEG electrodes is verified (protocol step 6.2) before each trial in the protocol, the poor electrode connection can be remedied prior the next trial.
| Name | Company | Quantity |
| BrainAmp Amplifier | Brain Products, Gmbh | 2 |
| actiCAP EEG cap with 64 electrodes | Brain Products, Gmbh | 1 |
| Brainvision MOVE wireless EEG system | Brain Products, Gmbh | 1 |
| DataLOG MWX8 EMG data collection unit | Biometrics, Ltd. | 1 |
| SX230 EMG electrodes | Biometrics, Ltd. | 8 |
| R506 EMG ground electrode | Biometrics, Ltd. | 1 |
| Opal movement monitor (MARG sensor) | APDM, Inc. | 11 |
| Opal docking station for wireless data streaming | APDM, Inc. | 2 |
| Opal wireless access point | APDM, Inc. | 2 |
| Infrared Light Barrier Kit MK120 | Velleman, Inc. | 5 |
| Wixel Programmable USB Wireless Module | Pololu, Inc. | 6 |
Table 1. Equipment.
| Sensor | Location |
| Head | Center of forehead above eyebrows |
| Trunk | Between pectorals at base of sternum |
| Lumbar | Center of back at minimum of lumbar curve |
| Arm1 | Lateral side of arm; proximal to wrist ~10% to elbow |
| Thigh1 | Lateral side of thigh; 50% between hip and knee |
| Shank1 | Lateral side of shank; 75% distal from knee |
| Foot1 | Centered on the instep of the foot |
| 1Arm, Thigh, Shank, and Foot sensors are placed bilaterally. | |
Table 2. MARG Sensor Locations.
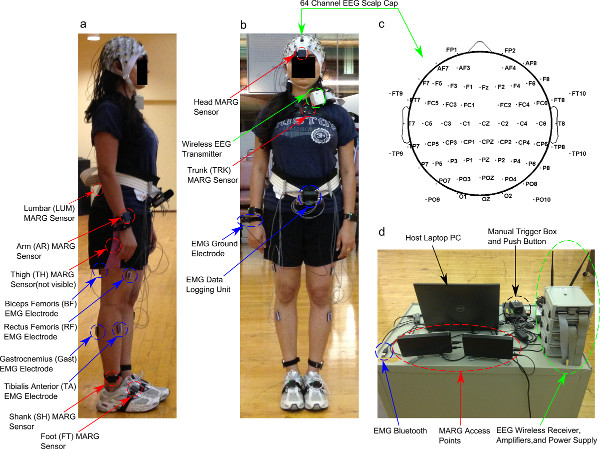
Figure 1. Sagittal (a) and frontal (b) view of a subject wearing EEG, EMG, and MARG inertial sensors for data collection. (c) Topographic representation of EEG electrode locations on the scalp, plotted with EEGlab Matlab toolbox 14. (d) Mobile data collection cart containing host PC, manual trigger, EMG Bluetooth, MARG wireless access points, and EEG wireless receiver, amplifiers, and power supply. Click here to view larger figure.
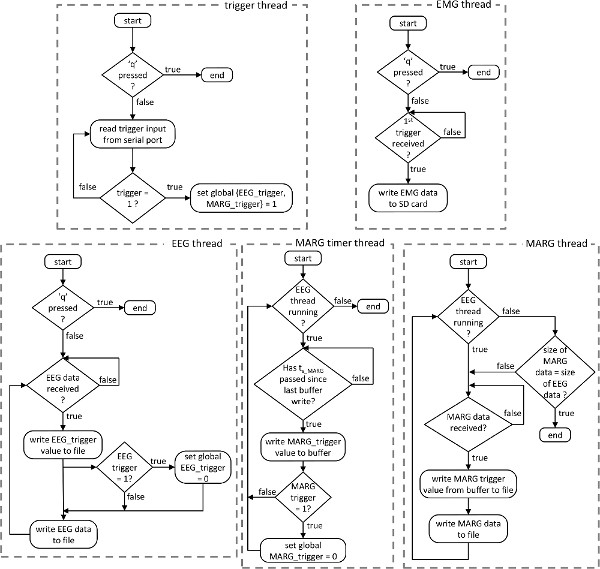
Figure 2. Flowchart detailing the algorithm for the custom designed, multi-threaded data collection software. Click here to view larger figure.
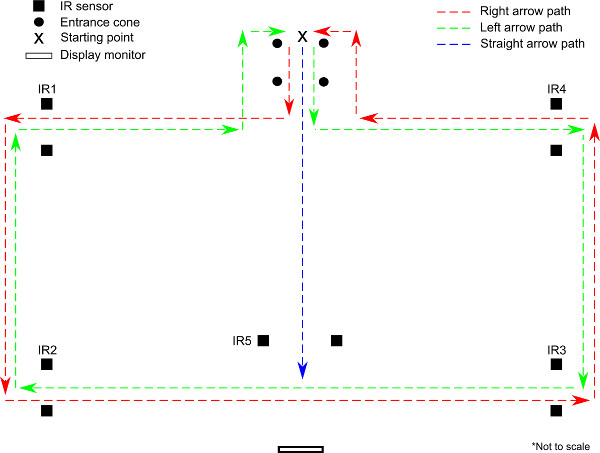
Figure 3. Schematic (bird’s eye) representation of arena walking (1) experimental protocol. One arrow (→, ←, or↑) is presented on the display monitor when the subject is at the end of the entrance cones. If right (→) or left (←) is presented, the subject follows the red or green loop, respectively, passing through four sets of infrared (IR) sensors (IR1-IR4). If the straight (↑) is presented, the subject walks toward the display monitor (blue line), and a second arrow (→ or ←) is presented when the subject is approximately 1 meter before the IR sensors (IR5). After passing through the IR5 sensor set, the subject completes the loop along the corresponding (red or green) path, returning to the starting point.
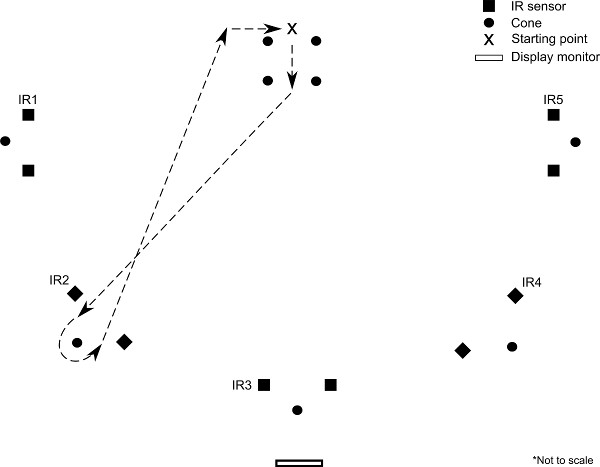
Figure 4. Schematic (bird’s eye) representation of arena walking (2) experimental protocol. At the start of the experiment, a single arrow (, , →, ←, or ↑) is presented to the subject on the display monitor. Based on the arrow received, the subject walks directly to the corresponding set of IR sensors, passes through the sensors, completes a U-turn around the cone, and returns to the starting point (loop corresponding to arrow is shown above).
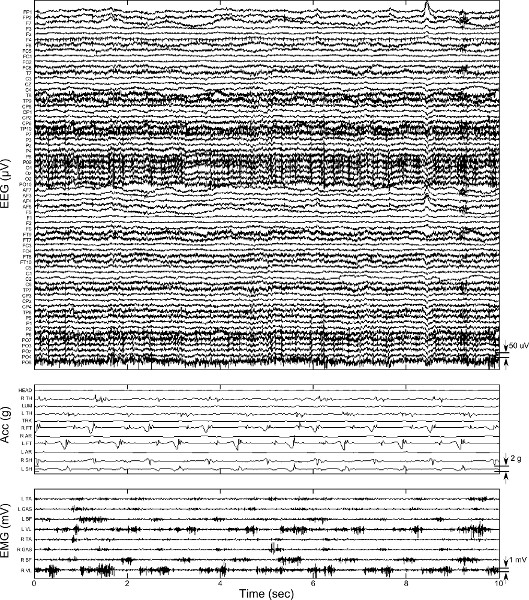
Figure 5. Sample data from 10 sec of treadmill walking. Top panel shows 64 channel raw EEG data with channel name from 10-20 international convention. Middle panel shows acceleration in the vertical direction from 11 MARG sensors. Bottom panel shows 8 channel raw EMG. Click here to view larger figure.
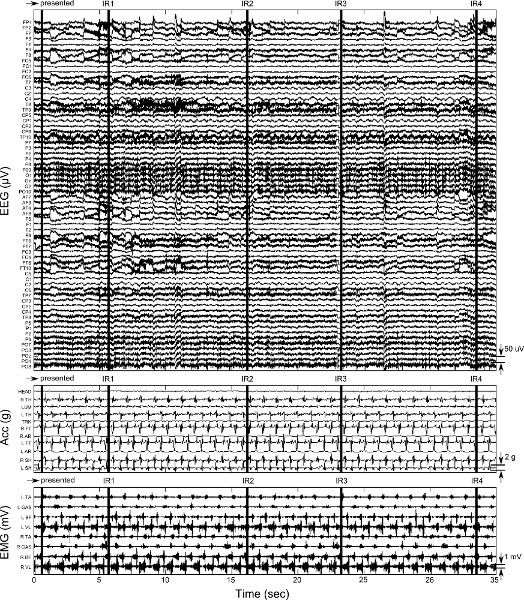
Figure 6. Sample data from one loop (right arrow path, Figure 3) of walking during the arena I protocol. EEG, acceleration, and EMG data are presented as in Figure 5. Vertical black bars are location of triggers received by the software. The first trigger is from the manual push button initiating the loop by presenting the → arrow. The following four triggers are from IR sensors IR1-IR4 (Figure 3) as the subject traverses the loop. Click here to view larger figure.
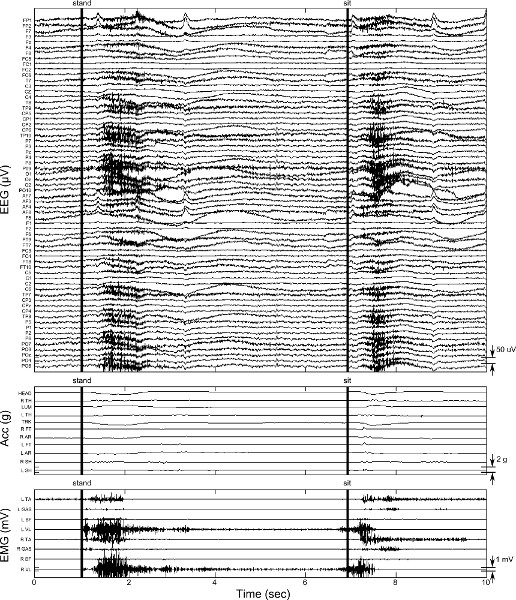
Figure 7. Sample data from stand-to-sit and sit-to-stand transition. EEG, acceleration, and EMG data is presented as in Figure 5. Vertical bars indicate manual triggers (and audio cues) to initiate standing and sitting, respectively. Click here to view larger figure.
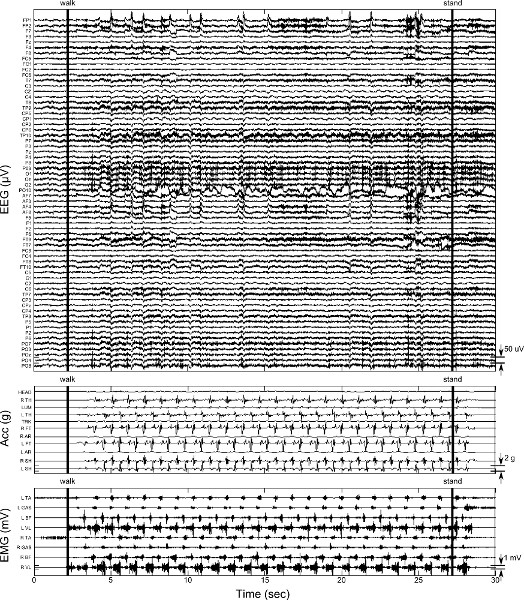
Figure 8. Sample data from hallway walking showing transition from standing to walking and walking to standing. EEG, acceleration, and EMG data are shown as in Figure 5. Vertical bars indicate manual triggers and audio cue to begin ansd stop walking, respectively. Click here to view larger figure.
