Figure 1A shows the scheme of the photoactive reaction used to synthesize the L-EGP/L8 hydrogel. Figure 1B shows the hydrogel mixture in the PTFE tube before and after the photoactivation. Figure 1C presents the extruded L-eGFP-L8 hydrogel inside a Tris solution. The hydrogel sample has no structural defects such as notches. Hydrogels with clearly visible damage should be discarded.
The rendering of the assembled and exploded views of the force-clamp rheometer are presented in Figure 2A and 2B. Figure 2C shows the force-clamp rheometer scheme, where the hydrogel sample is tethered between the hooks connected to the linear voice-coil and the force sensor and immersed in a buffer solution. The analog PID system adjusts the hydrogel extension by controlling the linear-voice coil position to follow the force set point. Figure 2D shows the tuning of the PID using various increments for the integral gain.
Figure 3 shows a typical attachment process of a hydrogel sample. After tethering the hydrogel between the aligned hooks, the suture loops are tightened around the hydrogel near the bends to prevent the sample from slipping and to allow for the precise determination of the hydrogel length.
Force-ramp Measurement and Analysis of Protein-based Hydrogels:
Representative measurements of the force-ramp protocol are shown in Figure 4A – 4C. Each new pull starts with a slack measurement, as shown in Figure 4A. Then, the force curve is obtained by applying an inverted "V" protocol as the load increases and decreases linearly with time. Afterward, the hydrogel is held at a 0 mN force for 200 s, to allow the protein domains inside the hydrogel sample to refold (Figure 4B). During stress, the PID system modifies the hydrogel extension represented by the coil position to follow the predefined force set point. For each slack curve, we fit 2 lines (Figure 4C). The blue line is used to fit the first regime when the hydrogel recoils and the orange line is used to fit the regime when the hydrogel becomes slack. The intersection between the two lines is used to calculate the true gel length with a micrometer resolution (Figure 4A). Afterward, the extension of the hydrogel sample is calculated by subtracting the initial coil position from the coil position trace (Figure 4D). Figure 4F presents the stress-strain curve. The stress is calculated by dividing the applied force by the cross-sectional area of the hydrogel sample and the strain is calculated by dividing the extension (Figure 4E) by the true gel length calculated from the slack curve as presented in Figure 4A.
Constant-force Measurement and Analysis of Protein-based Hydrogels:
Representative measurements of a constant-force protocol are shown in Figure 5A – 5D. A constant force of 0.1 mN is applied to the hydrogel sample for 30 s, the force is then changed to 1 mN for 120 s, and finally, the force is quenched back to 0.1 mN for 300 s to allow the protein domains to refold (Figure 5A). During the first 30 s at low force, there is no notable change in the gel extension. When increasing the force to 1 mN, the hydrogel shows a fast elastic extension. Following this initial extension, the hydrogel keeps extending over time, while keeping the force constant (1 mN). Afterward, the force is quenched back to the initial low value (0.1 mN) and the hydrogel recovers to its initial length (Figure 5B). The extension of the hydrogel sample (Figure 5C) and the force are used to calculate the strain (top) and stress (bottom) in a similar fashion as in the force ramp measurements (Figure 5D).
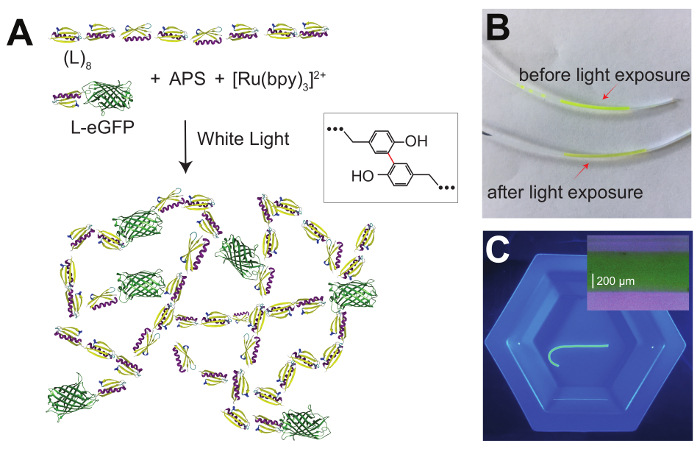
Figure 1: L-eGFP/(L)8-based hydrogel synthesis. (A) This panel shows the schematics of an L-eGFP/(L)8 protein hydrogel synthesis using a photoactivated reaction. The protein is mixed with APS and [Ru(bpy)3]2+ and exposed to white light, which promotes the formation of covalent bonds between adjacent tyrosine amino acids (inset). (B) This panel shows an L-eGFP/(L)8-, [Ru(bpy)3]2+-, and APS-mixture loaded into a PTFE tube using a 23 G needle before exposure to white light (top), and after (bottom). (C) This panel shows an extruded L-eGFP/(L)8-based hydrogel into a Tris solution. The inset shows a magnified image of an L-eGFP/(L)8-based hydrogel. The diameter distribution is 552 ± 8 μm, in agreement with the interior diameter of the PFTE tube used during the polymerization (558 μm). Please click here to view a larger version of this figure.

Figure 2: Force-clamp rheometer design and set-up. (A) Rendering of the assembled force-clamp hydrogel rheometer. The inset shows a protein-based hydrogel sample attached to the voice coil and force sensor hooks inside the solution chamber. (B) Rendering of the exploded view of the force-clamp hydrogel rheometer: (a – c) the x–y–z manipulators for adjusting the voice-coil hook position, (d) the linear voice coil motor, (e) the force transducer, (f) the force transducer holder, (g) the solution chamber, and (h – i) the x–y manipulators for adjusting the force transducer position. (C) Scheme of the force-clamp hydrogel rheometer set-up. The scheme shows a protein-based hydrogel sample attached to a force sensor and voice coil hooks using medical sutures. The analog PID system changes the hydrogel length by adjusting the voice-coil position to follow the force set point. (D) PID system response using different integral-gain values (I) to reach the force set point (dashed line). The colored traces represent the measured force (bottom) and strain (top) derived from the PID system response. Please click here to view a larger version of this figure.
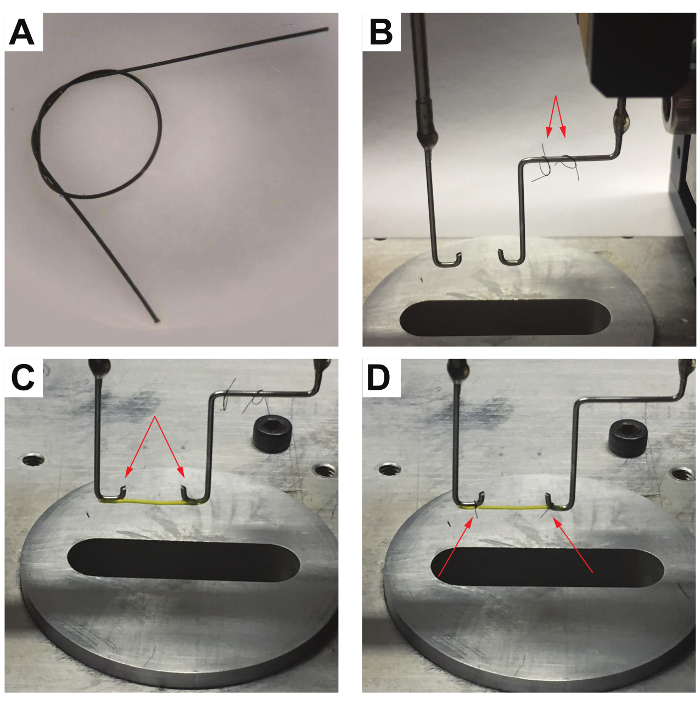
Figure 3: L-eGFP/(L)8-based hydrogel attachment process. (A) Close-up view of a suture loop, tied with a loose double overhand knot used to attach the hydrogel sample to the hooks. (B) The two suture loops are placed on the force sensor hook used in protein-based hydrogel attachment. (C) An L-eGFP/(L)8-based hydrogel sample is hung between the hooks (indicated by the arrows). (D) The suture loops on the side of the voice coil (left) and the force sensor hook (right) are tightened around the hydrogel sample at the bend of each hook to prevent the sample from slipping during the measurements. Afterward, the excess sutures are trimmed using medical scissors (indicated by the red arrows). Please click here to view a larger version of this figure.
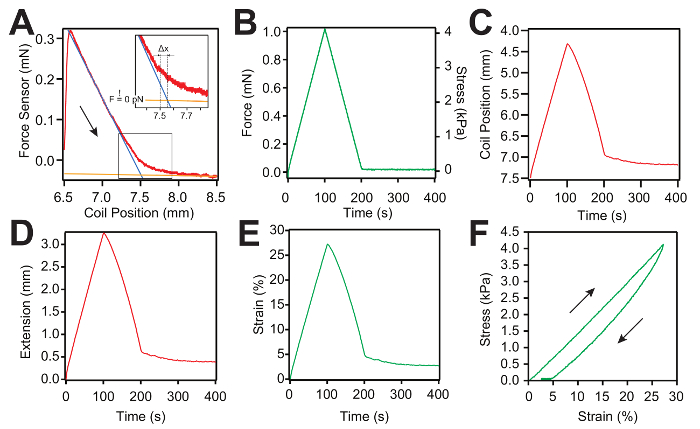
Figure 4: Representative force-ramp measurement and data analysis curves for an L-eGFP/(L)8-based hydrogel sample. (A) Typical slack measurement curve (red) used to determine the zero force of the force sensor and the true length of the hydrogel. Two linear curves (the blue and the orange lines) are used to fit both regimes: first, when the gel is under force (blue line), and second, when the gel becomes slack (plateau – orange line). The intersection between the two lines is used to calculate the true hydrogel length at zero force. The arrow shows the direction of the motion. The inset shows the location of the zero force and the correction of the hydrogel length. (B) Representative force-ramp curve applied to the hydrogel sample. (C) Trace representing the coil position movement as a function of time. The coil starts from the initial position defined in the protocol at step 3.1 (7.5 mm). (D) Representative curve of the extension of the hydrogel sample as a function of time. The extension is calculated as the displacement between the measured coil position and its initial position. (E) Representative strain-versus-time curve. The strain is calculated by dividing the extension by the true gel length calculated from the slack measurement. (F) Representative stress-strain curve of a hydrogel sample. Please click here to view a larger version of this figure.
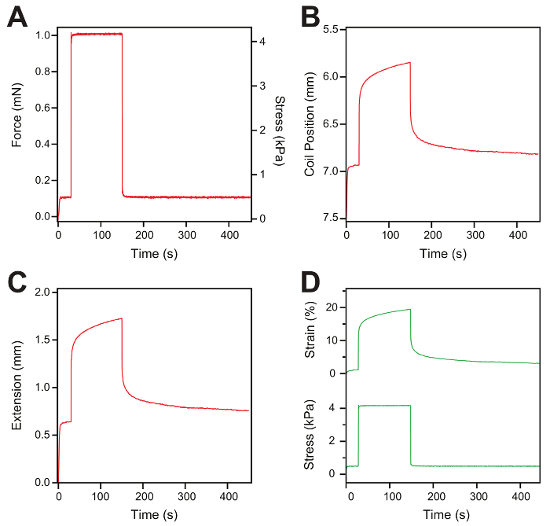
Figure 5: Constant-force measurement and data analysis. (A) Representative trace of the constant-force protocol applied to a hydrogel. The hydrogel is exposed to 0.1 mN for 30 s, then the force is increased to 1 mN for 120 s, and finally, the force is quenched back to 0.1 mN for 300 s. (B) This panel shows a coil position trace versus the time representing the change in the length of the hydrogel sample following the force protocol. (C) This panel shows the gel extension measured from the displacement of the voice-coil. (D) Representative figure of stress (bottom) and strain traces (top) after the data analysis. Please click here to view a larger version of this figure.
