In this study, a simple wireless method for EMG acquisition is presented. While a surgical procedure is necessary, only the specific area for electrode insertion and connector fixation is partially incised, significantly reducing the burden on the animal. In this demonstration, electrodes were inserted into the lower extremities, but similar electrophysiological studies can be conducted in various other areas using the same method. This approach offers the advantage of continuous electrophysiological signal measurement without the need for tether cables and without imposing behavioral restrictions. The circuit PCB has a diameter of 9 mm, a height of 3 mm, and weighs a total of 3 g. Battery replacement is straightforward, and the proposed system enables continuous monitoring of motor behavior. A photograph showing the attachment of the connector and device, as well as the EMG waveform, is presented in Figure 7.
In this study, a treadmill was used to analyze the rats' movement patterns. The treadmill is an effective tool for analyzing animal movement17, allowing for the assessment of muscular or neurological issues. While it can also be used to study free movement in rats, this experiment specifically aims to analyze movement abnormalities caused by various conditions. To achieve this, continuous and repetitive movement is required, making the treadmill a suitable choice for our purposes.
Various methods can be used to analyze animal locomotion with EMG. Among these methods, the symmetry index was used in the behavioral analysis21,22. The symmetry index measures the balance of activity between two muscles on either side of the body, and we have used it to evaluate recovery from a stroke.
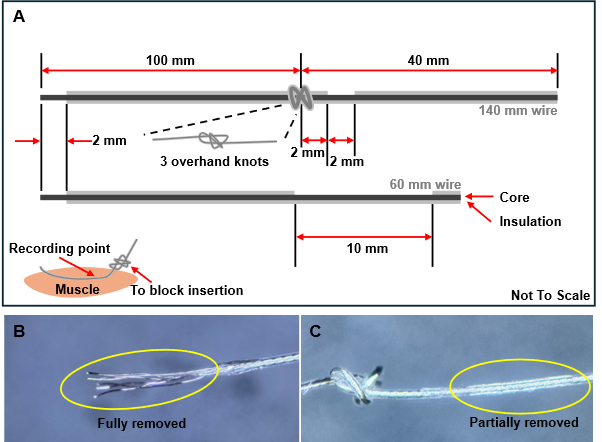
Figure 1: Wire electrode preparation process. (A) Illustration of the wire structure and the position of insulation removal. Three knots should be tied when inserting the wires into the muscles to prevent excessive insertion. (B) The insulation is fully removed at the wire edge. (C) The insulation is partially removed to facilitate muscle contact. Please click here to view a larger version of this figure.
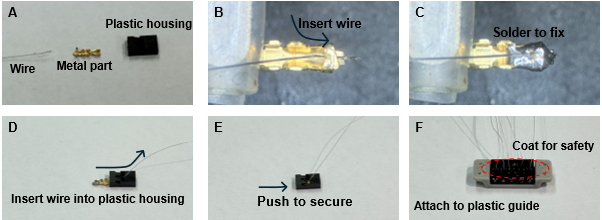
Figure 2: Wire electrode and connector assembly process. (A) Preparation of materials for assembly. (B) Insertion of the wire into the metal component. (C) Soldering the wire to the metal components. (D) Pulling the wire through the opening of the plastic housing. (E) Inserting the wire and metal components into the plastic housing. (F) Completing the assembly for all wires and using cyanoacrylate adhesive to attach the plastic housing to the suture guide (gray part). Please click here to view a larger version of this figure.

Figure 3: Surgical tools required for the procedure. A collection of surgical tools needed for the procedure, including (1) suture needle, (2) scalpel handle, (3) forceps, (4) surgical scissors, (5) fine scissors, (6-8) needle holder, and (9) prepared electrode. Please click here to view a larger version of this figure.
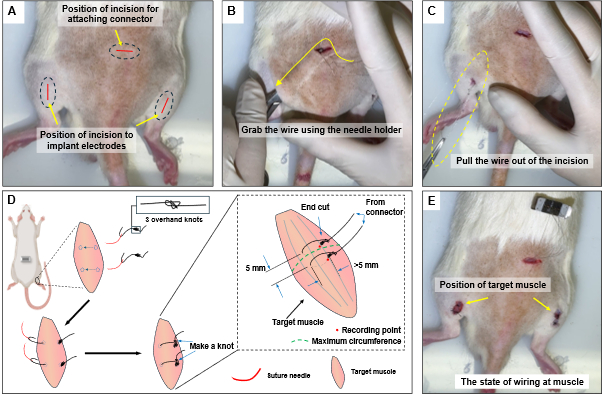
Figure 4: Electrode wire attachment procedure. (A) Incision positions on the back and leg. (B) Inserting the needle holder through the incision to grasp the wire. (C) Pulling the wire out of the incision. (D) Sewing technique at the target muscle, positioning the electrodes around the thickest part of the muscle with a spacing of 5 mm. (E) Final state of the operation being completed. Please click here to view a larger version of this figure.
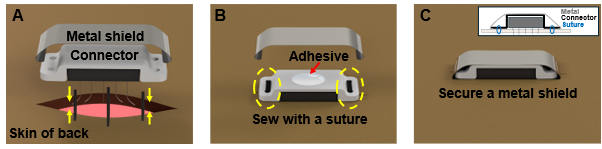
Figure 5: Connector Placement. (A) Suturing under the connector. (B) Fixing the connector with suture wire. (C) Applying adhesive on top of the connector and placing a metal shield for protection. Please click here to view a larger version of this figure.
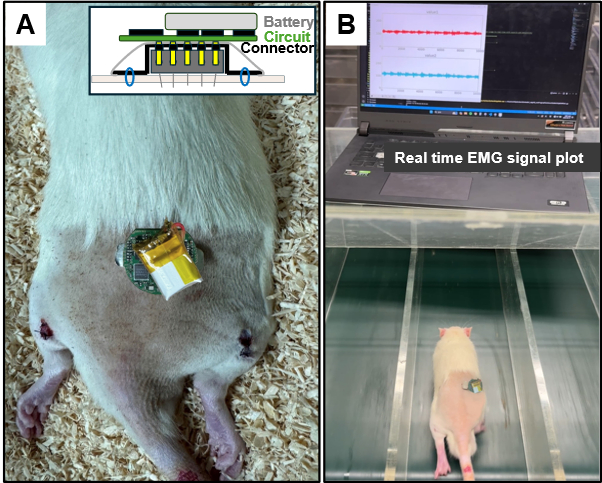
Figure 6: EMG acquisition demonstration. (A) Photograph of the EMG acquisition system mounted on a rat. (B) Conducting a treadmill test at a speed of 25 m/min. Please click here to view a larger version of this figure.
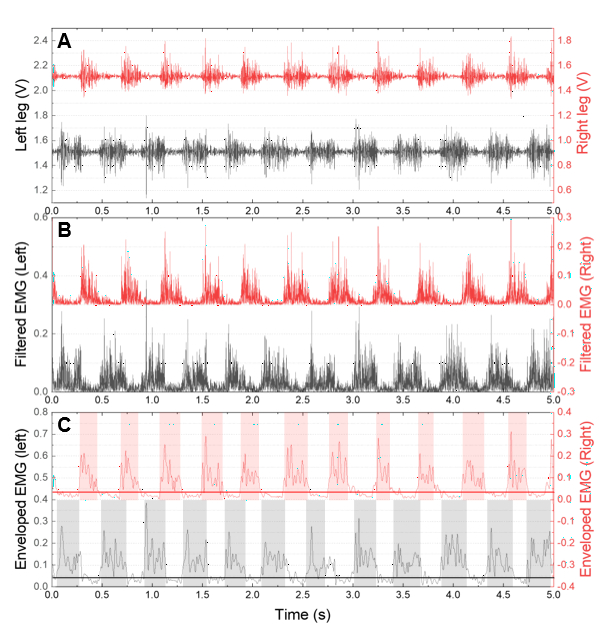
Figure 7: Measured EMG and enveloped EMG waveform. (A) The raw waveform of the measured EMG signal. (B) Filtered EMG signal used to obtain the envelope. (C) Enveloped waveform with a threshold line for symmetry index analysis. Please click here to view a larger version of this figure.
Supplementary Figure 1: Schematic of PCB circuit layout. A schematic representation of the printed circuit board (PCB) circuit layout, illustrating the arrangement of components and connections. Please click here to download this figure.
Supplementary Figure 2: PCB circuit design of the back layer. Design of the back layer of the printed circuit board (PCB), detailing the component placements and routing for the circuitry. Please click here to download this figure.
Supplementary Figure 3: PCB circuit design of the top layer. Design of the top layer of the printed circuit board (PCB), showcasing the layout of components and electrical connections. Please click here to download this figure.
Supplementary Coding File 1: Firmware preparation for ADC configuration. Instructions for preparing the firmware to configure a 2-channel analog-to-digital converter (ADC) with an 8-bit resolution and a sampling rate of 2 samples per second (kSPs). Please click here to download this file.
Supplementary Coding File 2: Python-based plotting application. Description of the Python-based plotting application used in this study for data visualization and analysis. Please click here to download this file.
