1. Experimental Setup and Procedures
Prepare an optical rail to mount a sample and optics for NIR imaging as follows.
- Sample preparation.
Note: When using water or aqueous liquid, do Step 1.1.1. When using an aqueous gel with high viscosity, do Step 1.1.2.- Steel sphere setting in water.
- Fix a 2.0-mm-diameter steel sphere to the end of a thin plastic string using a small amount of glue.
- Hang the steel sphere at the center of the rectangular glass cell with an optical path length of 10.0 mm, a width of 10 mm, and a height of 45 mm (Figure 3).
- Pour filtered water into the cell carefully so as not to produce air bubbles.
NOTE: A steel sphere can also be fixed to the tip of a thin plastic rod with a small amount of glue19.
- Steel sphere setting in aqueous gel.
- Heat an aqueous gel to reduce its viscosity such that it is low enough to be poured smoothly.
- Using a syringe, pour the aqueous gel into a rectangular glass cell with an optical path length of 2.0 mm, a width of 10 mm, and a height of 45 mm to half-full and leave it to cool.
- Place a 0.5-mm-diameter steel sphere in the center of the gel surface.
- Fill the cell with the aqueous gel.
NOTE: Larger spheres (>~1 mm dia.) should not be used with a gel because they will move by gravitational and/or magnetic forces during induction heating.
- Set the cell in a plastic holder and mount it on the optical rail (Figure 3).
- Steel sphere setting in water.
- Preparation of NIR imaging system.
- Prepare a halogen lamp with a fiber light guide, and fix the end of the fiber light guide with a holder on the optical rail.
- Place a narrow bandpass filter (NBPF) with a transmittance peak at λ = 1150 nm or λ = 1412 nm between the fiber light guide and the cell (Figure 3).
- Interpose another bandpass filter (BPF), whose transmission wavelength range is wider than that of the NBPF, between the halogen lamp and the NBPF.
NOTE: The BPF is needed to prevent thermal damage to the NBPF because it receives light directly. - Interpose an iris diaphragm(s) in the light path between the NBPF and cell holder to reduce the stray light (Figure 3).
- Set up an NIR camera to detect the light transmitted through the cell (Figure 3). Connect the camera through a data transfer cable to a graphic board installed in a personal computer (PC) with image acquisition software.
- Set a telecentric lens between the cell and camera (Figure 3).
NOTE: A common camera lens can also be used. However, a telecentric lens is better in terms of the selective detection of the light parallel to the chief ray for the IAT and reduction of the influence of diffraction.
NOTE: The NBPF and BPF should not be placed between the cell and camera because, in doing so, the water temperature would increase via direct absorption of high-intensity light from the halogen lamp. - Turn on the NIR camera and launch the image acquisition software.
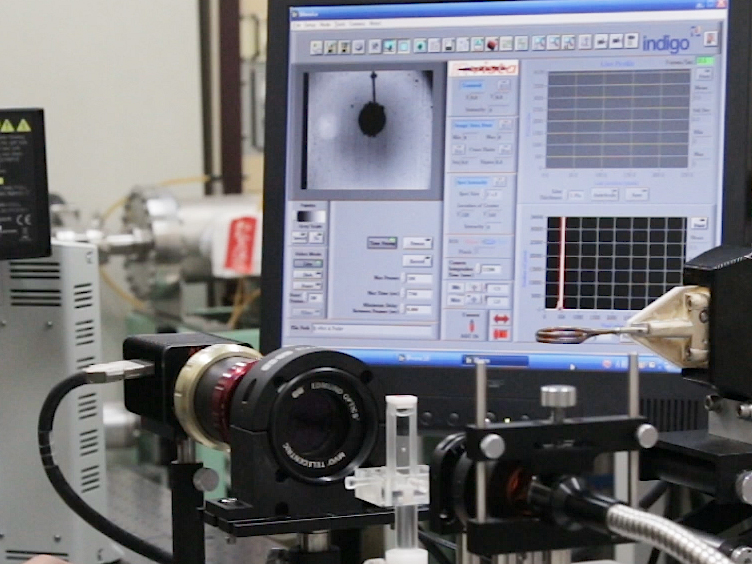
- Light the halogen lamp and adjust its output power observing the image displayed on the monitor (Figure 4).
- Adjust the axis, position, and focus of the telecentric lens to obtain a fine image of the steel sphere.
NOTE: If the adjustment is not complete, irregular intensity patterns will appear, leading to incorrect absorbances.
- Preparation of induction heating system.
- Prepare an induction heating system consisting of a high-frequency generator (maximum output power: 5.6 kW; frequency: 780 kHz), water-cooled coil, and water chiller.
NOTE: An induction heating system for brazing, welding, and soldering small metal parts is appropriate for this purpose; see Table of Materials. - If possible, mount the coil on an XYZ movable stage to change its position.
- Place the coil near the cell such that the distance between the coil center and the steel sphere is approximately 15 mm (Figure 3). Ensure that there are no other metal parts near the coil.
NOTE: The distance should be adjusted depending on the induction heating power and the sphere size. - Circulate water for cooling.
- Prepare an induction heating system consisting of a high-frequency generator (maximum output power: 5.6 kW; frequency: 780 kHz), water-cooled coil, and water chiller.
- Image acquisition and induction heating.
- Click "start" on the image acquisition software to store the images sequentially.
- Click "start" on the induction heating control software to commence the induction heating.
- After several seconds (depending on the conditions and purpose), click "stop" on the image acquisition software.
- Click "stop" on the induction heating control software.
- Save the temporally-stored images as a TIFF sequence (or other non-compressed format) on the image acquisition software.
NOTE: If the temperature is high enough, the effect of light deflection will appear on the image7. The induction heating power must be decreased appropriately though experiments such that the increase in the temperature near the sphere is less than approximately 10 K, which can be confirmed in the following protocol steps for temperature estimation.
2. Image Processing and Temperature Estimation
Note: The saved sequential images are represented as Ii(x, z), where i is the sequential frame number. The coordinates, x, y, z, r, and r' are defined as are indicated in Figure 2; z is positive in the direction opposite to gravity. The outline of the following protocol steps is also illustrated in Supplement 1.
- Absorbance image construction.
- Open Ii(x, z) with the image processing software.
- Reduce noise in Ii(x, z) by implementing 3 × 3 pixel averaging.
- Create an average image of Ii(x, z) over i = 1 to 5 (or more) before heating, and define it as the reference image, Ir(x, z).
NOTE: This averaging reduces the noise to obtain a more reliable image than a single frame image. - Construct the sequential images of the absorbance difference, ΔAi(x, z), via the following equation:
 (1)
(1)
NOTE: ΔAi(x, z) is the variation in the absorbance, Ai(x, z), from the reference absorbance, Ar(x, z), before heating, and is derived as follows15,16,17,18,19:
 (2)
(2)
where I0 is the intensity of incident light to the cell. - Colorize the ΔAi images using an appropriate color map such as blue-to-red.
NOTE: The command script file for running Steps 2.1.2 through 2.1.5 for ImageJ is presented in Supplement 2.
- Temperature estimation.
- Choose the time period during which ΔAi(x, z) is circularly symmetric with respect to the center of the sphere by visually observing the images.
NOTE: The circular symmetry is broken mainly by free convection. An image-based analytical judgement of free convection occurring is introduced in the previous work19; however, practically, the visual judgement is effective. - Extract the ΔAi(rʹ, θ) data along 360 radial lines (Δθ = 1˚) on the ΔAi(x, z) images.
- Exclude the ΔAi(rʹ, θ) data within the sphere and in its vicinity (Δrʹ≈ 0.2 mm). Note: The data are anomalously very small or large in the vicinity mainly because of the slight movement of the sphere.
- Average ΔAi(rʹ, θ) over θ to determine the line profile, ΔAi(rʹ).
NOTE: The command script file for running Steps 2.2.2 through 2.2.4 for ImageJ is presented in Supplement 3. - Approximate the ΔAi(rʹ) data by the following multi-Gaussian function:
 (3)
(3)
where aj is the weighting factor, σj is the dispersion parameter, and R is the maximum of rʹ where ΔAi(R) = 0 can be assumed. - Calculate the absorption coefficient difference, Δµi(r), by substituting the obtained N, aj, and σj into the following IAT of Eq. (3):
 (4)
(4)
where erf is the error function. - Convert Δµi(r) to temperature via the following equation:
 (5)
(5)
with the temperature coefficients of water, αf, which are 2.8 x 10-4 K-1 mm-1 for λ = 1150 nm19 and 4.1 × 10-3 K-1 mm-1 for λ = 1412 nm17.
Note: The command script file for running Steps 2.2.5 through 2.2.7 is presented in Supplement 4, where the Levenberg-Marquardt nonlinear least-squares algorithm17,19 is employed for Step 2.2.5.
- Choose the time period during which ΔAi(x, z) is circularly symmetric with respect to the center of the sphere by visually observing the images.
Images of ΔAi(x, z) at λ = 1150 nm for a 2.0-mm-diameter steel sphere in water and at λ = 1412 nm for a 0.5-mm-diameter steel sphere in maltose syrup are presented in Figure 5a and Figure 6a, respectively. In both cases, the sphere was located 12 mm below the bottom of the coil along its central axis. Figure 5b and Figure 6b show the ΔA(rʹ) data and their fitted multi-Gaussian functions in Eq. (3) with R = 3.0 mm and R = 1.5 mm, respectively. No more than two or three Gaussian functions (N = 2 or 3) are needed to achieve a good fit17,19. The fitted functions were then transformed into ΔT(r) profiles via Eqs. (4) and (5), and are presented in Figure 5c and Figure 6c.
The ΔA images in both cases clearly show an increase in the temperature of the water and gel surrounding the sphere due to thermal conduction. The circular symmetry of ΔA with respect to the sphere is observed in all images. The plots and curves in Figure 5c indicate that ΔA(rʹ) increases with time at distances nearest to the sphere; at rʹ≥ 2.5 mm, no significant change is observed. Moreover, the ΔT(r) profiles obtained via the IAT verify the occurrence of thermal conduction in the radial direction. Note that, although the ΔT(r) profiles appear similar to those of ΔA(rʹ), the changes in the dΔT(r)/dr gradient differ from those of the ΔA(rʹ) profiles. In Figure 6, the magnitudes of ΔA are found to correspond to the heating power levels, i.e., heat generation rates of the sphere.
Results for the 0.5-mm-diameter sphere demonstrate that free convection, which distorts the circular pattern in ΔA, was not observed after t = 1.2 s. Conversely, for the 2.0-mm-diameter sphere in water, free convection was found to occur after t = 1.2 s (not shown). This means that a transition from a pure thermal conduction regime to a free convection regime may have occurred in the water at approximately t = 1.2 s. This difference in free convection was caused by the differences in the heat generation rate and viscosity. The heat generation rate of the 0.5-mm-diameter sphere was significantly smaller than that of the 2.0-mm-diameter sphere; furthermore, the viscosity of the maltose syrup (approximately 100 Pa·s) was considerably higher than that of water (approximately 0.001 Pa·s). Because free convection is an important topic in heat and mass transfer research, the proposed imaging technique, which provides the onset time of free convection and pattern of the thermal plume and yields information on the physical conditions inducing free convection, will contribute significantly to research in this field.

Figure 1: Temperature dependence of NIR absorption spectrum of water. (a, b) Absorption band spectra of water at temperatures from 16.0 °C (blue) to 44.0 °C (red) in 4.0 °C increments in wavelength ranges of 1100-1250 nm and 1350-1500 nm, respectively. The arrows indicate the direction of the increase in temperature. The insets show the absorbance difference spectra; the absorbance spectra at 16.0 °C are the references. The optical path lengths are 10 mm and 1.0 mm in (a) and (b), respectively. The vertical dashed lines indicate the temperature-sensitive wavelengths of 1150 nm and 1412 nm used to obtain the NIR images. Please click here to view a larger version of this figure.

Figure 2: Coordinate system and geometry for absorbance imaging. Reproduced from Kakuta et al. 201719 with the permission of AIP Publishing. Please click here to view a larger version of this figure.

Figure 3: Experimental setup. (a) Schematic of the optical system and induction heating setup. See text for details. This figure has been modified from Kakuta et al. 201719 with the permission of AIP Publishing. (b) Photograph of the experimental setup. (c) Photograph showing a 2.0-mm-diameter steel sphere hung by a string, cell, and coil with a scale. Please click here to view a larger version of this figure.

Figure 4: Acquired raw images. (a, b) Transmitted intensity images, I(x, z), at λ = 1150 nm for a 2.0-mm-diameter steel sphere in water and λ = 1412 nm for a 0.5-mm-diameter steel sphere in maltose syrup, respectively. Please click here to view a larger version of this figure.

Figure 5: Absorbance images and temperature profiles for a 2.0-mm-diameter steel sphere in water. (a) ΔA(x, z) images at λ = 1150 nm and t = 0.4, 0.8, and 1.2 s after the onset of induction heating. (b) Plots of ΔA(rʹ) and their multi-Gaussian fits (solid curves). (c)ΔT(r) profiles obtained by performing IATs on ΔA(rʹ). Please click here to view a larger version of this figure.

Figure 6: Absorbance images and temperature profiles for a 0.5-mm-diameter steel sphere in maltose syrup. (a) ΔA(x, z) images at λ = 1412 nm and t = 0.4, 0.8, and 1.2 s after the onset of induction heating for the heating power levels of 10%, 30%, and 50%. (b) Plots of ΔA(rʹ) and their multi-Gaussian fits (solid curves) for 50%. (c)ΔT(r) profiles obtained by performing IATs on ΔA(rʹ) for 50%. Please click here to view a larger version of this figure.

Supplement 1: Outline of image processing. Please click here to view a larger version of this figure.

Supplement 2: Command script file for absorbance image construction (macro for ImageJ). Please click here to download this file.

Supplement 3: Command script file for line profile extraction (macro for ImageJ). Please click here to download this file.

Supplement 4: Matlab code for multi-Gaussian fitting and inverse Abel transform. Please click here to download this file.