Evolution of angular disparity and other variables
As depicted in step 3.3.1 in Supplemental File 2, two canvases are presented to the participant on the video monitor screen, displaying copies of the same 3D virtual object in different orientations. On the left canvas, the target object (tObj) remains static and serves as the target position or tObj position. On the right canvas, the interactive object (iObj) is shown in a different position and allows the participant to move it over time around a fixed rotation center using a mouse (only rotations; translations are disabled). The task at hand involves adjusting iObj to closely match tObj based on the participant's judgment. The three 3D objects used can be seen in Figure 1. The solving process, although complex, can be meticulously recorded for subsequent analysis. This recording goes beyond mere video footage as each position over time is captured at fixed 0.1 s intervals as a quaternion, forming a time series that enables a complete reconstruction of the entire process. At any position, there exists a unique rotation around a specific axis, ranging from 0° up to 180°, that directly transforms the tObj position into the iObj position. While this rotation is abstract and unrelated to the participant's PR during the task, it accurately indicates the precise iObj position relative to tObj. AD is the angle of this rotation and may be calculated from the respective quaternion. As the iObj position approaches the tObj position, this value approaches zero.
After step 3.1.6 of the Data processing and analysis section, two files were created: output merge X Y.xlsx and output jmol console X Y.xlsx, where X is the sessionID value, and Y is the taskID value. If using the default values by leaving the input fields blank, the files should be named output merge 1682707472090 bolaBastao_c.xlsx and output jmol console 1682707472090 bolaBastao_c.xlsx. The output merge X Y.xlsx files contain the selected eye tracker data merged into the iRT data, aligned by the UNIX Epoch time, similar to Figure 2A if everything proceeded correctly, or Figure 2B if some problem occurred.
The output jmol console X Y.xlsx files contain up to five tabs filled with Jmol console commands that, when pasted to the Jmol console, will reproduce the participant's movements when solving the task: rotation replay reproduces the iObj rotations made by the participant; gaze replay int reproduces the iObj rotations with added fixation heatmap on the object in time by using a transparency/opaque scale; gaze replay tgt shows only the 3D fixation heatmap of tObj during the task; gaze frame int and gaze frame tgt show the overall fixation mapping of the whole process for both iObj and tObj. All of them are illustrated in Figure 3A–F. Jmol and JSmol are essentially identical, Jmol being the plugin based in Java programming language, and JSmol in the JavaScript programming language, both having the same functionalities and being used interchangeably.
Figure 4 illustrates the evolution of angular disparity as a function of time for six different scenarios involving two participants and three objects. The duration of the process can vary significantly depending on the participant's performance with the interactive task object. In any task completed correctly by the participant, AD tends to zero at the end. If the same graph does not exhibit this behavior, either the participant was unable to complete the task because they gave up or reached the time limit per task (approximately 5 min), or an error occurred in the data processing.
The combined results of the iObj PR records and the data obtained from the eye-tracking measurements are shown in Figure 5. The variation in the angular disparity between the target and the inertial objects as a function of time indicates three distinct stages in the process of solving the task given: initial observation of the models; ballistic rotation of the interactive model; fine-tuning of the rotation of the interactive model. Figure 5A shows the gaze alternating between the models in the initial phase and, more specifically, in the fine-tuning phase. Figure 5B shows that the pupil remains more dilated in the initial and fine-tuning phases. In the fine-tuning phase, the long fixation period on the interactive model (40-47s in Figure 5A) corresponds to a plateau in pupil diameter (40-47s, Figure 5B).
These results suggest that the data obtained with the method proposed here are consistent with the model of mental rotation problem solving proposed on the basis of gaze fixation data for static models14,66 and for interactive models23. Such a model would encompass three stages: search, transformation and comparison, and confirmation of the match or mismatch between the models. In addition, the alternation of fixations between the target and interactive models in the comparison stages observed in Figure 5A is consistent with the results obtained in Sheppard and Metzler-type tests that use static images42,66. However, in the case of interactive models, it is likely that these stages of search, transformation, comparison, and confirmation occur successively through interaction and repositioning of the interactive model.
3D rotation trajectories
Each rotation in a 3D space from 0° to 180° can be translated to a point inside a ball (which is understood as the volume inside a sphere) with a radius equal to 180°. Figure 6 demonstrates this correspondence with three example rotations. The distance of the point to the center of the ball is the iObj angle disparity from the tObj position, and the vector pointing from the center of the ball to the point is the rotation direction, the rotation being made in the clockwise sense viewing from the center. This translation of rotations into points in a ball allows someone to directly visualize, in a single 3D drawing, the entire trajectory of rotations made by the participant in a task. We call this drawing the 3D rotation trajectory.
Analogously to the AD measure, for any tasks correctly completed by the participant, the trajectory should approach, in the end, the center of the ball. If the trajectory reaches the sphere's boundary at a rotation of 180°, it will wrap around to the antipodal point on the sphere. Figure 7 illustrates the rotation trajectory taken by the two previously mentioned participants performing the third task (C1 and C2 in Figure 4), viewed both in perspective and in projections on the three coordinate planes. It is clear from the figure that, despite the relatively small starting AD close to 45°, participant 1 initially deviated from the target position before finding a definitive path to the solution, unlike participant 2, who completed the task faster.
3D Fixation heatmap
During the problem-solving process, the participant alternates their gaze between tObj and iObj while interacting with iObj. With the eye-tracking data, we can extract the participant's gaze position and create a heatmap of the screen regions that captured the most and least attention from the participant in any given interval. Going further, with both the eye-tracking and iRT quaternion data synchronized, we can simultaneously map in 3D space and in time, how much attention each of the object vertices is receiving, even for objects being rotated in time.
In Figure 3, the attention given to the object is represented by the opacity level of each vertex. The closer it is to the participant's gaze and the longer it remains in proximity, the more attention it receives, resulting in higher opacity in that region of the object. The spatial decrease in attention is modeled using a bivariate homogeneous Gaussian function for the gaze position and a simple homogeneous Gaussian function applied for the elapsed time. The standard deviation of these Gaussians was chosen assuming a visual angle of 2 degrees67 and a visual short-term memory of 10 s68. To prevent any visual artifacts with this method, the gaze proximity data is set to zero while the gaze is outside the object canvas (iObj receives no residual attention when the gaze is inside the tObj canvas or outside both). Figure 3 shows a single frame from each object of an entire replay animation and the same frames with the 3D fixation heatmap. A possible comparison between tObj and iObj by the participant during the solving process can be seen (Figure 3C,D) as the task is nearing its conclusion (time = 6.3 s). The whole process can be seen as a video in Supplemental Video S1. We report the results of the computer-mediated rotation of 3D models presented to participants as a task taken under ordinary conditions.
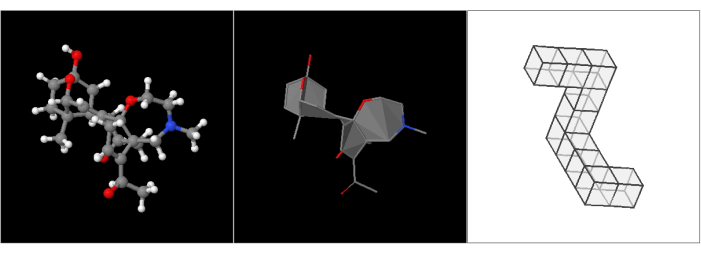
Figure 1: Target objects used. Image of the 3D models used in the webpage tasks. (A) A molecule with ball and stick representation; (B) The same molecule with filled polygons, no hydrogens, and represented by sticks only; (C) a polycube similar to one of the Shepard and Metzler figures13, derived from the stimuli library of Peters and Battista36. Please click here to view a larger version of this figure.

Figure 2: Sheets comparison. (A,B) Images are taken from the spreadsheet output merge 1682707472090 bolaBastao_c.xlsx. Columns A to G contain iRT data values, whereas columns H to N contain eye tracker data values. In (A), everything is correct, while in (B), in the eye tracker columns, all values are constant and do not match the iRT system time values. If any problem occurs with the data synchronization process, this error will likely happen. Please click here to view a larger version of this figure.
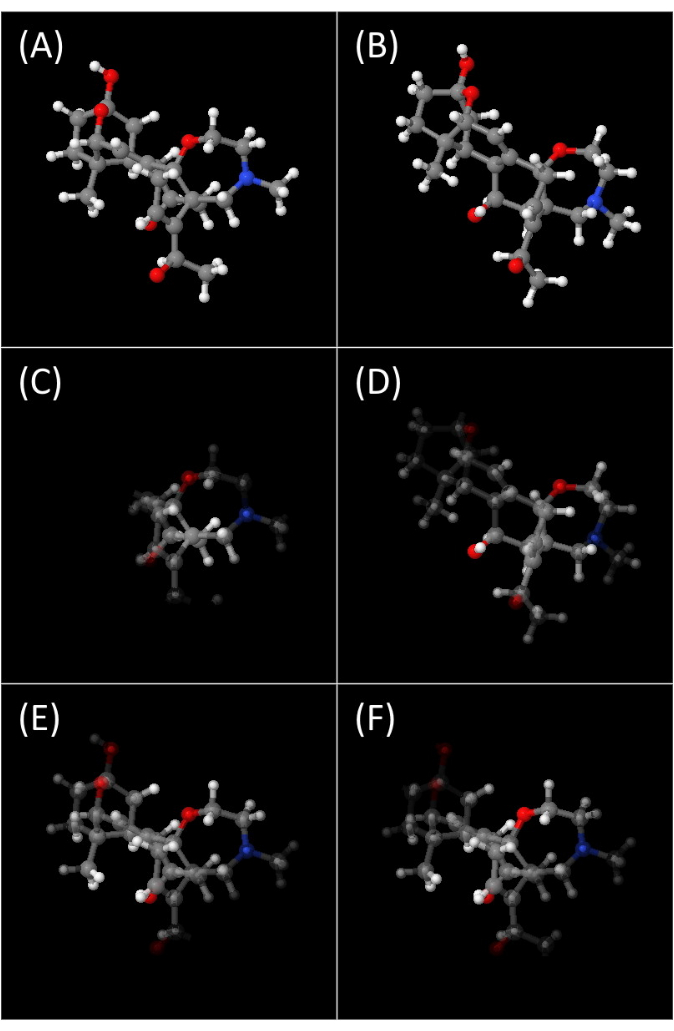
Figure 3: 3D fixation heatmap. Fixation heatmap over the 3D object using a scale of opacity, where more opaque correlates to more time spent near the participant gaze. (A,B) tObj and iObj images of the task being solved by the participant at the 6.3 s mark. (C,D) Same images as (A,B) at the same instant with the added opacity scale of the heatmap. (E,F) Fixation heatmap images considering the entire period for which the participant could see the objects. Please click here to view a larger version of this figure.
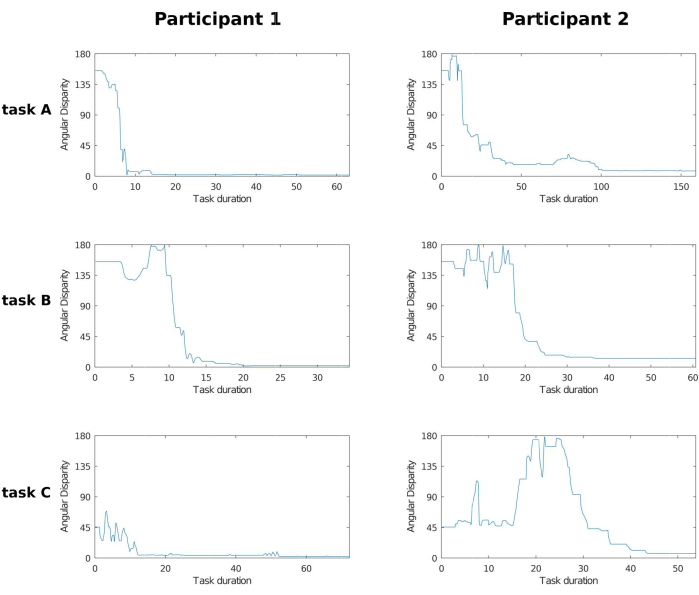
Figure 4: AD grid. Plot grid of angular disparity across two participants and three tasks. Columns represent participants 1 and 2, and rows represent the tasks solved by the participants using the three objects illustrated in Figure 3. Note that while AD varies between 0° and 180°, the time range is not fixed and varies with the participant's performance and their own decision to stop the process. As the participant rotates iObj, the AD between tObj and iObj varies as time progresses, and eventually the participant chooses the current iObj orientation as the closest to tObj. In the 1st and 2nd tasks, both participants seemed to have progressed in a similar manner, but participant 1 took half as much time as participant 2. And in the 3rd task, although participant 2 took less time to complete the task, participant 1 had already solved the task before the 20 s mark and kept making small adjustments to better match iObj to tObj. Abbreviation: AD = angular disparity. Please click here to view a larger version of this figure.
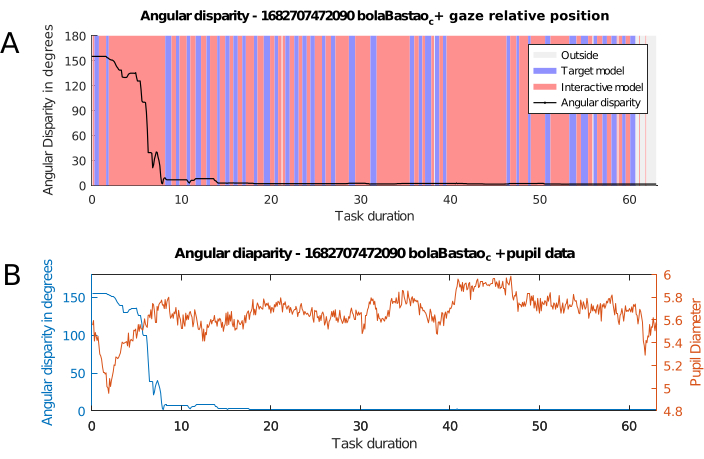
Figure 5: AD with eye-tracking data. Evolution of angular disparity combined with eye-tracker data. (A) Angular disparity and gaze position, theevolution of angular disparity between tObj and iObj, coupled with regional fixation data for each model. The graph shows what region the participant's gaze is located in: red when inside iObj canvas, blue when inside tObj canvas, and gray when outside both of them, looking at another element on the screen or looking away from it. (B) Angular disparity and pupil diameter. Angular disparity, in blue, coupled with pupil diameter data, in orange. Pupil diameter is the mean value of left and right pupils at each point in time. Abbreviation: AD = angular disparity. Please click here to view a larger version of this figure.
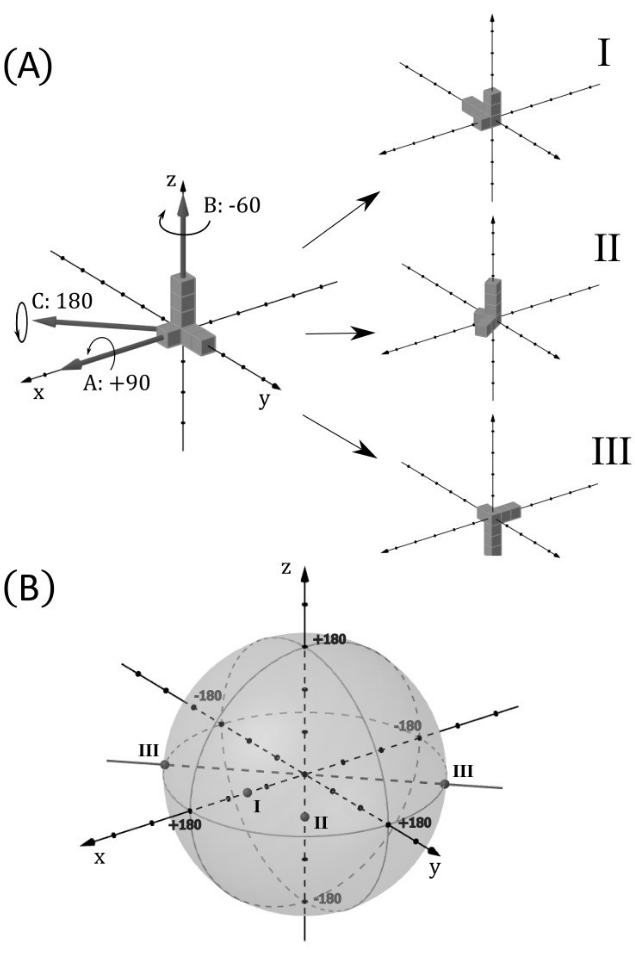
Figure 6: Ball of rotations. This figure illustrates how each possible rotation position of an object from a reference position can be represented as a point in a ball of radius 180°, allowing a complete representation of the object's rotational position in all three axes. Here, a ball is understood as the volume bounded by a sphere. (A) The object used as an example is an asymmetric union of seven cubes, depicted at the top, to the left. Three simple rotations numbered I, II, and III are applied to this object, as shown to the right. They are, respectively, +90° on the x-axis, -60° on the z-axis, and 180° on an axis between +x and -y, at 45° from both axes. (B) The ball of rotation is shown with the points corresponding to the rotations I, II, and III. The distance to the center of the ball is the angle disparity. As III achieves the maximum rotation angle (180°), it is also represented at its antipodal point, as they are essentially the same. Rotation II, being anticlockwise with respect to the positive direction of axis z, appears on the negative side. Please click here to view a larger version of this figure.
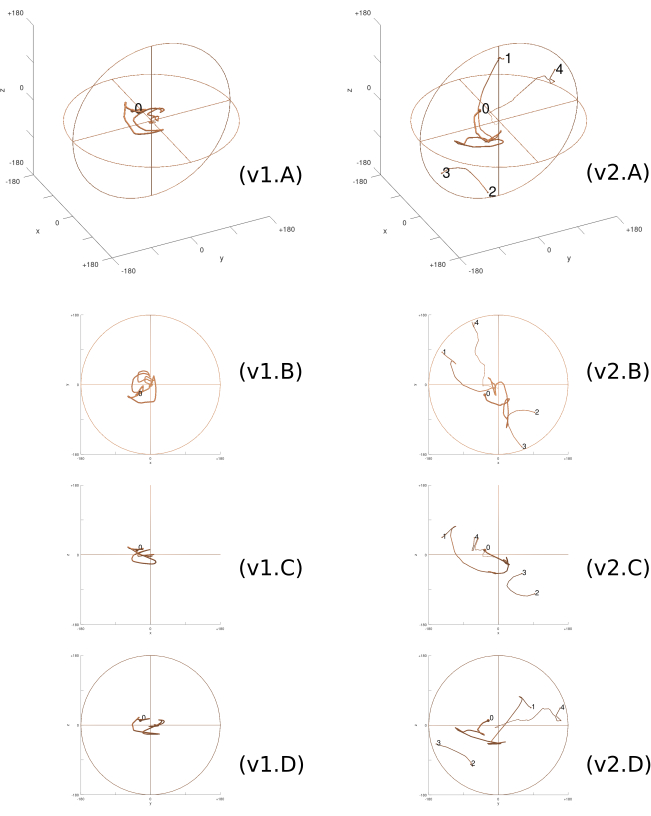
Figure 7: 3D Rotation trajectory. The rotation trajectory inside the ball of rotations taken by the two participants in the third task, viewed both in perspective (A) and in projections on the coordinate planes (B–D). Line thickness decreases over time. Each column corresponds to a participant (v1 and v2). As the trajectories approach the center of the ball, the participants are closer to solving the task. '0' indicates the initial position of the task. Subsequent numbers indicate points where the trajectory reaches the edge of the ball and continues through the antipodal point at the opposite side (1 to 2, 2 to 3, 3 to 4, etc). Please click here to view a larger version of this figure.
Supplemental Table S1: Sheet headers. List of headers in the cloned sheet file. Each header corresponds to a variable name and will receive data from this variable forming a column of values used in the processing and analysis of our data. Please click here to download this File.
Supplemental File 1: Protocol step 1 guide. A list of screenshots guiding through the steps of the protocol method "1. Preparation of data collection tools". Please click here to download this File.
Supplemental File 2: Protocol step 3 guide. A list of screenshots guiding through the steps of the protocol method "3. Data processing and analysis". Please click here to download this File.
Supplemental Video 1: Fixation mapping replay. An example of animated replays of the temporal attention mapping in 3D from iObj and tObj simultaneously. Recorded using OBS Studios and rendered using OpenShot Video Editor. Please click here to download this File.
